
виды (стоя, сидя, на скамье) и техника выполнения упражнения
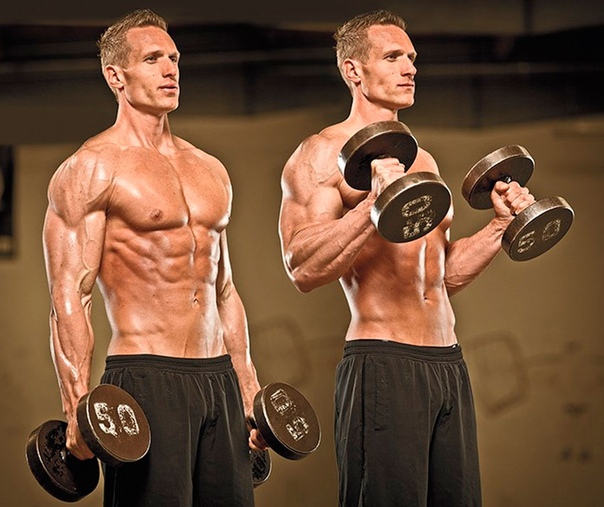
Сгибания рук с гантелями – упражнение для изолированной проработки бицепса. Атлеты выполняют сгибания рук с гантелями с целью увеличить объем бицепса, а также сильнее развить его пик. Это упражнение относится к числу изолированных, здесь нет смысла работать с большими весами, так как бицепсы любят большое количество повторений и максимальное чувство кровенаполнения. Техника упражнения достаточно проста, однако посмотрите вокруг: каждый второй посетитель тренажерного зала выполняет его неправильно, и мышечная масса их рук не увеличивается годами.
В нашей сегодняшней статье мы расскажем, как накачать руки с помощью этого упражнения, как увеличить КПД выполнения сгибаний рук с гантелями на бицепс и какая вариация подъемов на бицепс лучше подойдет для Ваших целей.
Какие мышцы работают?
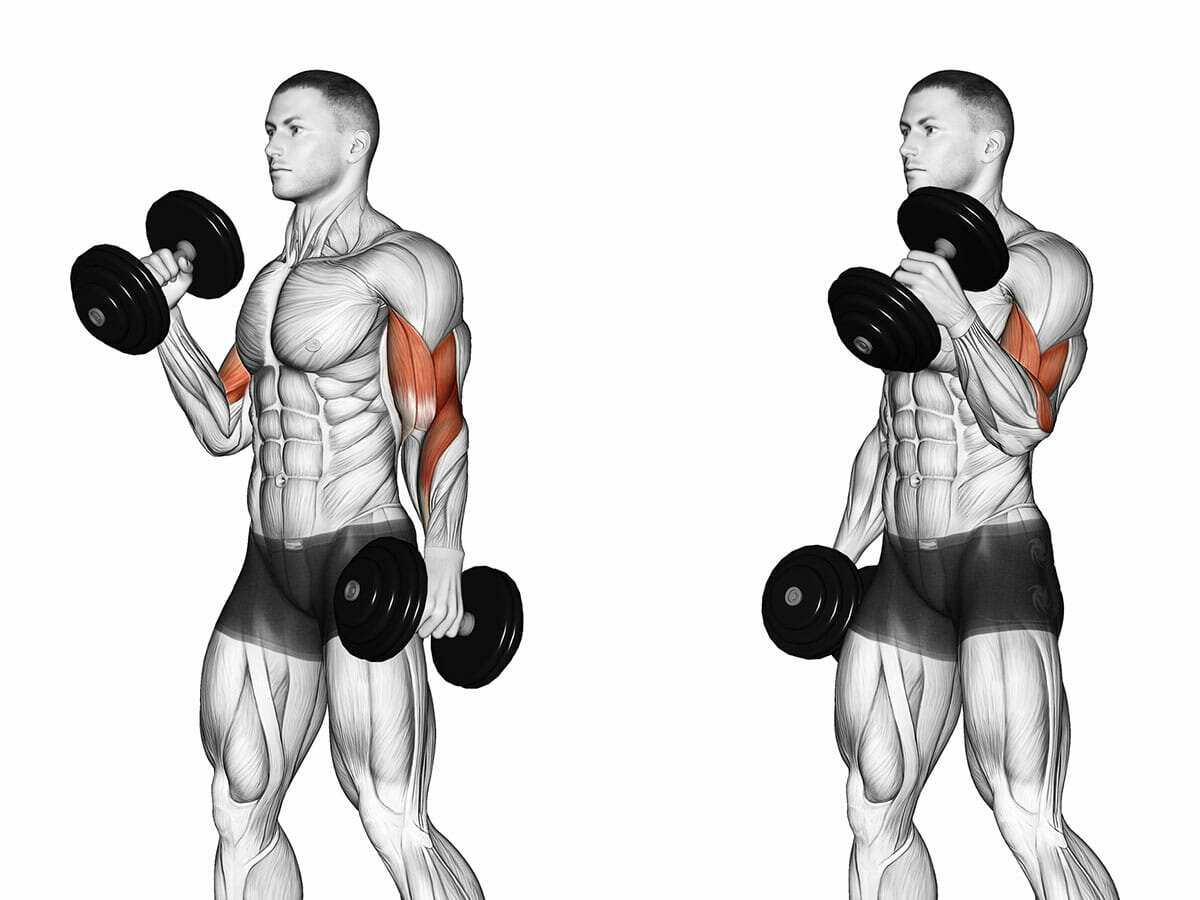
Выполняя данное упражнение, Вы изолированно нагружаете двуглавую мышцу плеча (бицепс), причем основная часть нагрузки приходится на его верхнюю часть, что придает бицепсу более пиковую форму.
Стабилизаторами в этом упражнении выступают предплечья, передние пучки дельтовидных мышц, брахиалис, брахирадилаис и сгибатели запястья.
Виды сгибаний рук с гантелями
Сгибания рук с гантелями имеют несколько вариантов выполнения. Их можно делать стоя, сидя, с использованием специальной скамьи Скотта или даже лежа. Далее мы более подробно расскажем о каждой разновидности упражнения.
Сгибание рук с гантелями стоя
Сгибания рук с гантелями стоя – самая распространенная вариация этого упражнения. Она примечательна тем, что при ее выполнении допустим небольшой читинг, что дает возможность работать с чуть большим весом, чем, например, при концентрированных сгибаниях рук с гантелями. Упражнение может выполняться разными способами:
- Попеременное (поочередное) сгибание рук с гантелями – выполняем по одному повторению левой и правой рукой по очереди. Положение кисти не меняем, в нижней точке стараемся максимально растянуть бицепсы;
- Сгибание рук с гантелями стоя хватом молоток («молотки») – более базовое движение, которое вовлекает в работу еще и брахиалис и мышцы предплечья.
 Хорошо развитый брахиалис визуально «выталкивает» бицепс наружу, что делает объем руки больше, а развитые предплечья увеличивают силу хвата и помогают нам работать с большими весами в тяговых движениях;
Хорошо развитый брахиалис визуально «выталкивает» бицепс наружу, что делает объем руки больше, а развитые предплечья увеличивают силу хвата и помогают нам работать с большими весами в тяговых движениях; - Сгибание рук с гантелями с супинацией – движение затрагивает немного другие мышечные волокна за счет супинации (разворота) кисти во время подъема гантели. Можно выполнять как поочередно, так и одновременно двумя руками.
 Хорошо развитый брахиалис визуально «выталкивает» бицепс наружу, что делает объем руки больше, а развитые предплечья увеличивают силу хвата и помогают нам работать с большими весами в тяговых движениях;
Хорошо развитый брахиалис визуально «выталкивает» бицепс наружу, что делает объем руки больше, а развитые предплечья увеличивают силу хвата и помогают нам работать с большими весами в тяговых движениях;Сгибание рук с гантелью стоя в наклоне
Сгибания руки с гантелью стоя в наклоне – упражнение, требующее от Вас крепкой поясницы и предельной концентрации на работающей мышце. Рекомендуется выполнять его с небольшим весом и в большом диапазоне повторений (от 12 и выше). Наклонившись вниз почти до параллели с полом, немного разверните гантель и старайтесь поднимать ее к противоположному плечу, делая небольшую паузу в точке пикового сокращения.
Сгибание рук с гантелями сидя
Сгибание рук с гантелями сидя – расположитесь на краю скамьи и выполняйте попеременные или одновременные сгибания рук с гантелями. В этом положении Вам будет проще сохранять правильное расположение локтей, и работа получится более продуктивной.
В этом положении Вам будет проще сохранять правильное расположение локтей, и работа получится более продуктивной.
Сгибание рук с гантелями сидя на наклонной скамье
Сгибание рук с гантелями сидя на наклонной скамье – установив спинку скамьи под небольшим наклоном (20-30 градусов), Вы почувствуете сильное растяжение в нижней части бицепсов в нижней точке амплитуды. Сгибания рук с гантелями сидя под углом следует выполнять плавно, с задержкой в 2-3 секунды в нижней позиции, так бицепс получит максимальный стресс, что приведет к его росту.
Сгибание рук с гантелями лежа на наклонной скамье
Сгибание рук с гантелями лежа на наклонной скамье – поставьте спинку скамьи примерно под 45 градусов и лягте на нее вниз животом. Одновременно поднимайте гантели на бицепс обеими руками по направлению к голове, стараясь не менять положения локтей во время выполнения подхода. Негативная фаза движения не менее важна – ни в коем случае не роняем вес вниз, а контролируем его на каждом сантиметре амплитуды. Упражнение отлично подойдет людям, имеющим проблемы со спиной, так как в нем отсутствует осевая нагрузка на позвоночник.
Упражнение отлично подойдет людям, имеющим проблемы со спиной, так как в нем отсутствует осевая нагрузка на позвоночник.
Концентрированные сгибания рук с гантелями
Концентрированные сгибания рук с гантелями – изолированное упражнение на проработку пика бицепса. По биомеханике оно схоже со сгибаниями рук в наклоне, но здесь мы работаем еще более изолированно, так как локоть работающей руки упирается в колено или нижнюю часть бедра. Выполняйте упражнение чисто, применять читинг здесь не имеет смысла.
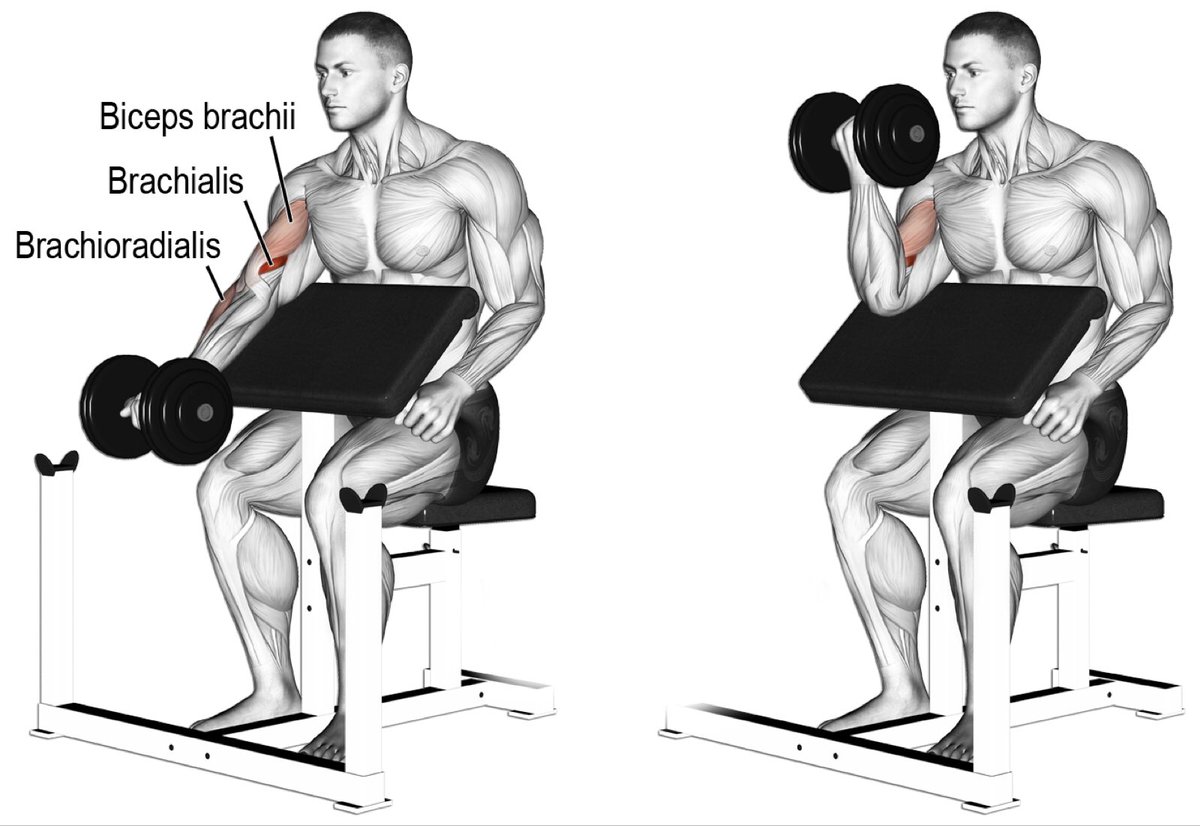
Сгибание рук с гантелями на скамье Скотта
Сгибание рук с гантелями на скамье Скотта – схожее с концентрированным подъемом на бицепс упражнение. Однако здесь требуется сильная фокусировка на негативной фазе амплитуды, это хорошо растянет бицепс и поможет добиться более сильного пампинга. Если в Вашем тренажерном зале нет скамьи Скотта, это упражнение можно выполнять на обычной скамье с регулируемым уровнем наклона – просто поставьте спинку под прямым углом и облокотитесь на нее трицепсом.
Польза упражнения и противопоказания
Упражнение отлично помогает проработать те участки бицепса, которые сложно «зацепить», работая со штангой или на блочных тренажерах. Работа с гантелями не требует столь сильной концентрации на правильном положении корпуса, как при подъеме штанги на бицепс, и нам проще наладить нейромышечную связь с работающей мышцей.
Любые вариации сгибаний рук с гантелями не рекомендованы спортсменам, перенесшим травмы локтевых или плечевых суставов и связок. Во время подъема гантели создается слишком сильная нагрузка на не до конца залеченный участок, что часто приводит к рецидиву травмы.
Техника выполнения упражнения
Вне зависимости от того, какой именно вид подъема гантелей на бицепс вы выполняете (стоя, сидя, в наклоне и т.д.), технические принципы всегда одинаковы. Соблюдение правильной техники поможет вам лучше сконцентрироваться на работе бицепсов и убережет от возможных травм.
- В исходной позиции рука полностью распрямлена, спина прямая, а локти расположены как можно ближе к корпусу либо зафиксированы (как при концентрированных сгибаниях или подъеме на бицепс на скамье Скотта). Исключение составляет сгибание рук с гантелями в наклоне – здесь локоть не имеет никакой опоры, и мы не можем прижать его к корпусу. Однако, это не означает, что можно выводить локоть вперед или назад – это чревато получением травмы.
- Подъем гантели осуществляется на выдохе. Многие неправильно понимают название упражнения. Сгибание руки должно представлять именно сгибание руки, а не заброс гантели вверх усилием всего тела. Нам важно правильно нагрузить бицепс, а не забросить гантель в вертикальное положение любой ценой.
- Негативная фаза движения должна сопровождаться вдохом. Движение должно быть плавным, важно фокусироваться на чувстве растяжения в бицепсах.
 Исключение составляет сгибание рук с гантелями в наклоне – здесь локоть не имеет никакой опоры, и мы не можем прижать его к корпусу. Однако, это не означает, что можно выводить локоть вперед или назад – это чревато получением травмы.
Исключение составляет сгибание рук с гантелями в наклоне – здесь локоть не имеет никакой опоры, и мы не можем прижать его к корпусу. Однако, это не означает, что можно выводить локоть вперед или назад – это чревато получением травмы.Особенности и типичные ошибки
Если это упражнение не привело вас к заметному прогрессу в увеличении объема рук, значит, вы делаете что-то неправильно. Выхода два: нанять персонального тренера и ставить технику выполнения этого упражнения под его руководством или внимательно прочитать этот раздел нашей статьи и взять на вооружение полученную информацию.
Выхода два: нанять персонального тренера и ставить технику выполнения этого упражнения под его руководством или внимательно прочитать этот раздел нашей статьи и взять на вооружение полученную информацию.
Ошибки новичков
- Использование тяжелых гантелей с убеждением, что чем тяжелее снаряд – тем быстрее накачаются мышцы. Работа с большим весом намного усложнит задачу – вы не сможете прочувствовать сокращение и растяжение бицепсов. Кроме того, вам вряд ли удастся сделать достаточное количество повторений. Рекомендуемый диапазон повторений при работе на бицепс – 10-15 раз.
- Чрезмерный читинг. Помогать себе корпусом допустимо только при выполнении последних 2-3 повторений, когда мышца уже почти достигла отказа. Если вы начинаете забрасывать гантель вверх с первых повторений, помогая себя плечами и спиной, значит, рабочий вес слишком велик.
- Неправильное положение локтей. Выводить локти вперед при поочередном подъеме гантелей на бицепс с супинацией категорически нельзя – это травмоопасно для локтевых суставов.
- Использование атлетического пояса без необходимости. Не используйте специальный пояс, если у вас нет проблем с поясницей. Осевая нагрузка здесь совсем небольшая, и вы точно не получите травму. Однако движение требует правильной частоты дыхания, следует за очередность вдохов и выдохов в поясе намного сложнее.

Технические особенности
Если вы учли и исправили все вышеописанные ошибки, то теперь примите ко вниманию несколько простых советов по поводу технических особенностей выполнения упражнения. Они помогут вам добиться максимальной пользы.
- Многие новички часто интересуются, что более эффективно для тренировки рук: сгибания рук с гантелями или молотки. Ответ прост: оба упражнения одинаково эффективны, если делать их технически правильно, но молотки еще и нагружают предплечья и брахиалис. Выполняйте и то и другое упражнение для равномерного развития мышц и сохранения эстетичных пропорций.
- Делайте тренировки рук более разнообразными – это даст хороший стресс вашим бицепсам. Варьируйте порядок и количество упражнений с каждой тренировкой.
- Сохраняйте единый темп выполнения упражнения во время всего подхода – так вам будет проще концентрироваться на сокращении бицепсов.
- Чем движение более изолированное – тем лучше для роста бицепсов. Попробуйте следующий прием: при концентрированном сгибании рук или сгибании рук на скамье Скотта используйте открытый хват и немного разверните кисть от себя – это будет держать бицепс в постоянном напряжении и не даст ему расслабиться в нижней точке. Само собой, вес гантели должен быть небольшим.
- Чтобы ментально настроить себя на изолированную работу бицепсов, попробуйте выполнить несколько подходов строгих подъемов на бицепс со штангой или гантелями. Для этого встаньте к вертикальной спине и облокотитесь на нее затылком, спиной и ягодицами. Заметили, насколько движение стало тяжелее? А теперь представьте, что вся эта нагрузка приходится не на руки, а на поясницу и плечи. Все еще думаете, что вы качаете бицепс, а не что-то другое?
 Варьируйте порядок и количество упражнений с каждой тренировкой.
Варьируйте порядок и количество упражнений с каждой тренировкой.Кроссфит комплексы
Оцените материалСтаж тренировок — более 8-ми лет.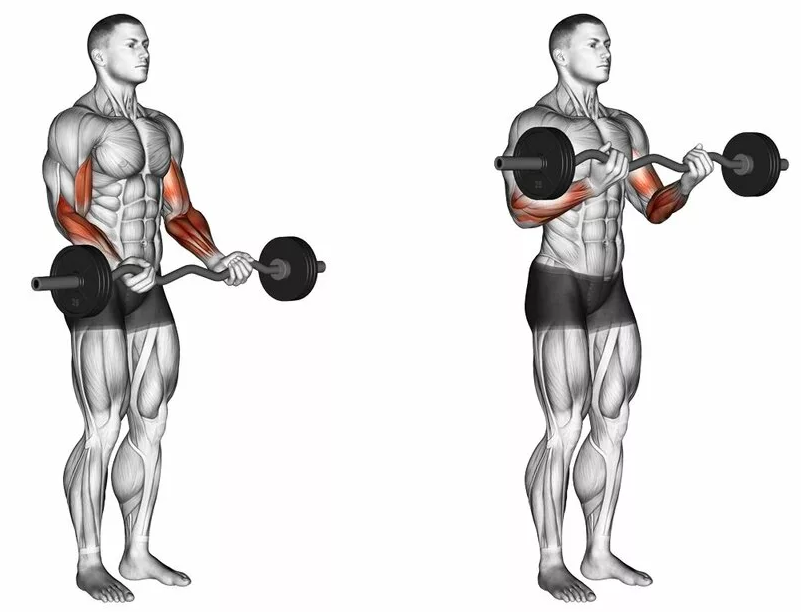 Победитель и призёр всероссийских турниров по пауэрлифтингу и становой тяге. Кандидат в мастера спорта по становой тяге.
Победитель и призёр всероссийских турниров по пауэрлифтингу и становой тяге. Кандидат в мастера спорта по становой тяге.
Редакция cross.expert
7. Сгибание рук — Стюарт МакРоберт : Всестороннее руководство по технике выполнения упражнений с отягощениями
7. Сгибание рук — Стюарт МакРоберт : Всестороннее руководство по технике выполнения упражнений с отягощениямиБицепсы, брахиалис, предплечья.
Краткое описание:
Из положения стоя или сидя, руки опущены вниз, поднимите вес вверх, согнув руки в локтях.
Вступление
Несмотря на всю простоту и популярность этого упражнения, многие выполняют его неправильно, превращая его в малоэффективное движение, которое, к тому же, приводит к проблемам в локтевых суставах.
Сгибание рук можно выполнять либо со штангой, либо с гантелями, стоя или сидя. Если делать упражнение сидя, то придётся остановить свой выбор на гантелях, чтобы Вы имели возможность полностью распрямлять руки.
Двуглавая мышца руки не только сгибает руку в локтевом суставе, но и осуществляет её супинацию. Супинация происходит, когда Вы поворачиваете руку из положения «ладонь вниз» в положение «ладонь вверх». Супинация невозможна при работе со штангой. Однако, бицепс — это не единственный сгибатель руки. Эту функцию также выполняет брахиалис. Сгибание рук с отягощениями нагружает и эту мышцу.
Сгибание рук со штангой
Встаньте прямо, ступни расставьте на ширине таза. Колени слегка разомкните, это затрудняет читинг. За штангу возьмитесь супинированным хватом (ладонями кверху). Ширина хвата — примерно чуть шире ширины таза. Отталкиваясь от этого ориентира, найдите «свою» ширину хвата, которая будет подходить Вам наилучшим образом и не будет приводить к болям в локтях и запястьях. Многие делают подъёмы неправильным хватом — они берутся за штангу либо чересчур широко, либо чересчур узко.
В течение всего подъёма штанги, держите запястья и руки на прямой линии, т. е. в нейтральном положении. Это — очень важная оговорка. Если не держать запястья и руки в нейтральном положении, то в будущем проблем с этими суставами Вам не избежать.
е. в нейтральном положении. Это — очень важная оговорка. Если не держать запястья и руки в нейтральном положении, то в будущем проблем с этими суставами Вам не избежать.
Вверху: правильная прямая или нейтральная позиция рук и запястий.
Внизу: неправильное положение кистей.
Если Вы не можете держать лучезапястные суставы в нейтральном положении, то прекратите на пару месяцев делать сгибания рук вообще и посвятите это время усилению хвата и мышц предплечий.
Слева: правильное положение рук в верхней точке.
Справа: неправильное положение.
Поднимите штангу вверх, согнув руки в локтях. Не забрасывайте её вверх усилием всего тела! Движение следует начинать, держа локти по бокам так, чтобы верхние части рук были вертикальны, если смотреть на них как спереди, так и сбоку. Сгибая руки, никогда не позволяйте локтям двигаться назад или в стороны! Во время сгибания локти должны двигаться вперёд лишь чуть-чуть. В верхней точке Ваши руки должны остановиться за несколько сантиметров до той точки, в которой Ваши предплечья стали бы перпендикулярны полу.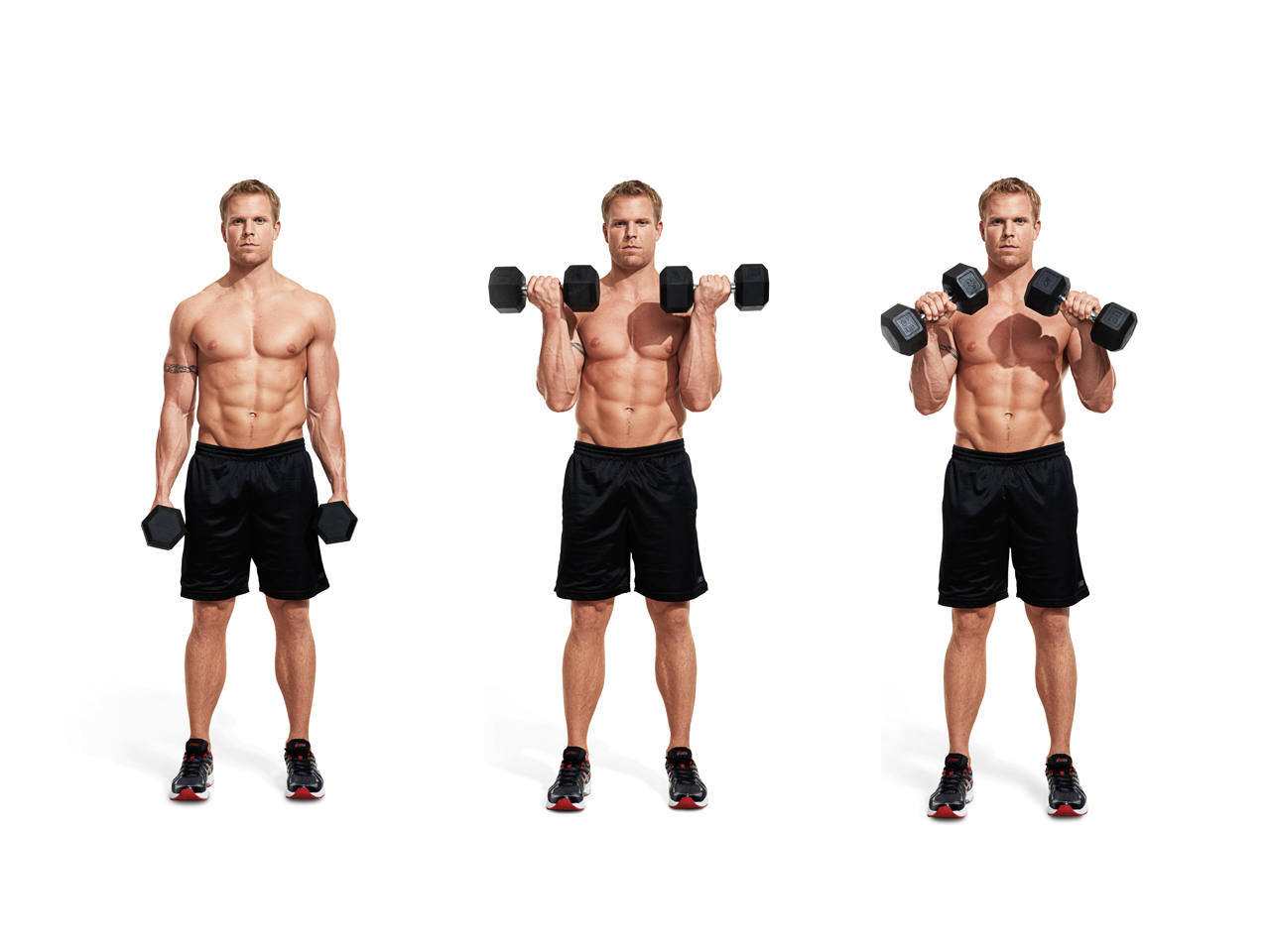 Ваши руки могут подняться до уровня плеч, но не выше. Вы не должны давать себе отдых в верхней точке амплитуды.
Ваши руки могут подняться до уровня плеч, но не выше. Вы не должны давать себе отдых в верхней точке амплитуды.
Поднять руки выше позиции, описанной здесь, у Вас получится лишь тогда, когда Ваши локти сдвинутся сильно вперёд и в работу включатся передние дельтовидные мышцы. Большинство атлетов, к сожалению, позволяют локтям выходить далеко вперёд. Нагрузку на сгибатели рук это не увеличивает, зато возрастает риск травмы локтевых, плечевых суставов и поясницы.
Понаблюдайте за собой в зеркало, повернувшись к нему боком, и уясните для себя, в какой позиции должны находится руки вверху. Начав сгибать руки со строгой и правильной техникой, Вы будете вынуждены уменьшить свои рабочие веса. Пусть это Вас не огорчает — ведь сейчас, когда Вы переключились на правильную технику, Ваши бицепсы и брахиалис получают даже большую нагрузку, чем тогда, когда Вы занимались с более тяжёлым весом, но с читингом и с сильным включением в работу дельтовидных мышц. Сгибайте руки со строгой техникой и Ваши дельтовидные мышцы, наконец-то, перестанут болеть после сета интенсивных сгибаний рук.
В верхней точке амплитуды, где мышцы сокращены, сделайте небольшую паузу. Однако, это не будет отдыхом — если Вы выполняете сгибания рук правильно, то «отдохнуть» в верхней точке попросту не получится. «Отдых» вверху получается лишь тогда, когда Вы делаете сгибания неверно, т.е. выдвигаете локти вперёд, держа гриф под самым подбородком, перенося тем самым нагрузку со сгибателей рук на плечи и локти. Откажитесь от этой неправильной техники!
Опускать вес следует также под контролем. В конце каждого повторения делайте небольшую паузу, прежде чем сделать очередное повторение. Сделайте вдох или два, задержите дыхание и затем поднимите вес вверх силой только рук. Поднимая вес, сделайте выдох. Или же, на подъёме Вы можете задержать дыхание на секунду, а выдох сделать во время опускания веса.
Если прямой гриф приводит у Вас к боли в локтевых или лучезапястных суставах, попробуйте браться за него немного шире или уже. Если это не устранит проблему, то попробуйте изогнутый гриф или занимайтесь с гантелями.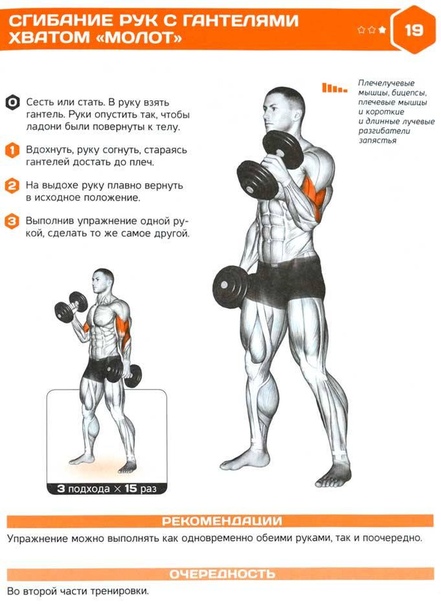 Но если, занимаясь с прямым грифом, Вы не можете держать свои кисти в нейтральном положении, как отмечалось выше, Вам нужно просто увеличить силу своих предплечий.
Но если, занимаясь с прямым грифом, Вы не можете держать свои кисти в нейтральном положении, как отмечалось выше, Вам нужно просто увеличить силу своих предплечий.
Сравнение прямого грифа и изогнутого EZ-грифа.
Будьте осторожны, если решите делать сгибания рук с толстым грифом диаметром 5 см и толще. Толстый гриф увеличивает травмоопасную нагрузку на локти. Начинайте с очень небольшого веса и медленно наращивайте веса.
Если при сгибаниях рук Вы встанете спиной к стене так, чтобы Ваша голова и таз также касались её, то это поможет Вам избежать читинга. Однако, делать так со штангой неудобно, т.к. в нижней точке ноги не дадут Вам опустить штангу вниз до конца. Поэтому, лучше взять гантели. В качестве альтернативы, Вы можете попробовать делать сгибания рук со штангой на вертикальной скамье «для молитвы». Сядьте так, чтобы верхний край скамьи упирался Вам в подмышки, затем попросите Вашего помощника подать Вам в руки штангу. Будьте очень осторожны, чтобы не потерять контроль в нижней части амплитуды. Вы не должны допускать переразгибания (гиперэкстензии) локтевых суставов! Пусть Ваш помощник стоит наготове на тот случай, если Вам понадобится помощь. Несмотря на то, что «скамья для молитвы» поможет Вам улучшить технику, забудьте о мифе, что это упражнение, якобы, способно «удлинить» Ваши бицепсы! Это всего лишь одно из многочисленных заблуждений, которые столь популярны среди обитателей спортзалов.
Вы не должны допускать переразгибания (гиперэкстензии) локтевых суставов! Пусть Ваш помощник стоит наготове на тот случай, если Вам понадобится помощь. Несмотря на то, что «скамья для молитвы» поможет Вам улучшить технику, забудьте о мифе, что это упражнение, якобы, способно «удлинить» Ваши бицепсы! Это всего лишь одно из многочисленных заблуждений, которые столь популярны среди обитателей спортзалов.
Сгибание рук со штангой можно выполнять и сидя. Это превращает движение в частичное, потому что из-за ног Вы не сможете опускать штангу вниз до конца, не сможете выпрямлять руки в локтях полностью. Чтобы обеспечить опору для скамьи и улучшить технику, упритесь спиной в вертикальную спинку скамьи. В нижней точке в каждом повторении делайте паузу. Не делайте повторения «в отбив» от ног.
Сгибания рук с гантелями
С гантелями Вы можете сгибать одну руку, обе руки поочерёдно или обе руки одновременно, причём делать это всё как сидя, как и стоя. Разные положения лучезапястных суставов оказывают несколько разную нагрузку на сгибатели рук и по-разному нагружают локтевые суставы.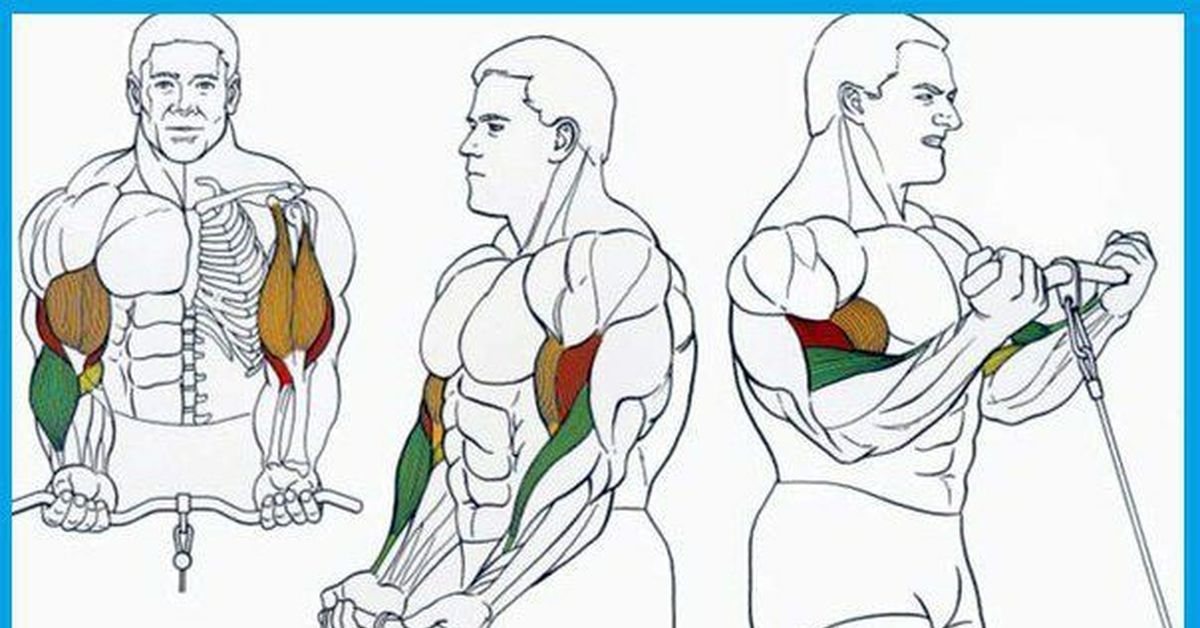
В качество одного из вариантов этого упражнения, Вы можете сгибать руки, держа их постоянно большими пальцами вверх. Такие сгибания называются «молотковыми». В этом варианте хват оказывается параллельным, а, значит, самым естественным для такого движения, как сгибание рук в локтях. Если у Вас когда-либо были проблемы с лучезапястными, локтевыми или плечевыми суставами, то, возможно, Вы найдёте молотковые сгибания самыми удобными.
Молотковые сгибания рук с гантелями.
Во всех сгибаниях рук с гантелями, кисти держите точно так же, как и в сгибаниях рук со штангой, т.е. в нейтральном положении.
Сгибания рук с супинированным хватом означают, что Ваши руки находятся в супинированном положении, т.е. ладони смотрят вверх, на протяжении всего упражнения. Однако, возможен и такой вариант, когда в каждом повторении хват, по мере движения рук по амплитуде, постепенно переходит в супинированный.
Делайте сгибания рук с супинацией стоя. Возьмите две гантели и начинайте каждое повторение из пронированной позиции, т. е. ладони смотрят назад. Внутренняя половина каждой гантели должна касаться бедра со своей стороны. Вместо того, чтобы браться за гриф гантели точно посередине, возьмитесь за него немного не по центру, ближе к внешней стороне. Вы можете обнаружить, что такой «смещённый» хват подойдёт для этого упражнения лучше, чем хват по центру.
е. ладони смотрят назад. Внутренняя половина каждой гантели должна касаться бедра со своей стороны. Вместо того, чтобы браться за гриф гантели точно посередине, возьмитесь за него немного не по центру, ближе к внешней стороне. Вы можете обнаружить, что такой «смещённый» хват подойдёт для этого упражнения лучше, чем хват по центру.
Сгибая руки с гантелями, вращайте кисти так, чтобы в верхней точке Ваши ладони смотрели вверх. Не нужно сначала супинировать, а затем сгибать. Супинация и сгибания должны происходить одновременно. Не позволяйте локтям двигаться в стороны или назад. И всегда держите лучезапястные суставы в таком положении, чтобы кисти были на одной линии с предплечьями, т.е. в нейтральной позиции.
Чем позже Вы начинаете супинировать кисти, тем труднее удержать локти в правильном положении рядом с торсом. Верхняя точка амплитуды должна быть там же, где и в сгибаниях рук со штангой. Если вес слишком тяжёл для Вас, то упражнение превратится в некое подобие частичного взятия на грудь.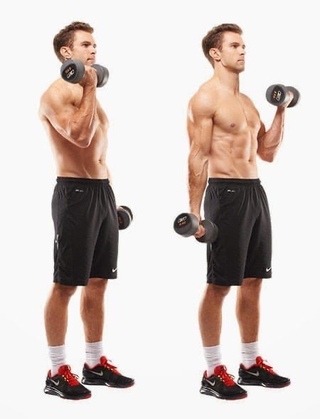 Сопротивляйтесь соблазну и не читингуйте с целью увеличения веса. Читинг снимет нагрузку с тех самых мышц, которые Вы стараетесь проработать.
Сопротивляйтесь соблазну и не читингуйте с целью увеличения веса. Читинг снимет нагрузку с тех самых мышц, которые Вы стараетесь проработать.
Опускайте гантели также под полным контролем, постепенно пронируя кисти во время движения рук вниз.
Подъём гантелей на бицепс с супинацией.
Помощь и страховка
Плохая техника в сгибаниях рук выражается в отклонении торса назад и в движении локтей вперёд. Как только Ваш торс начинает отклоняться от вертикали, Вам тут же нужно выпрямиться и начать серьёзнее следить за техникой. Но для завершения следующего повторения с хорошей техникой Вам понадобится небольшое участие со стороны партнёра. Помощник должен браться за гриф двумя руками, симметрично. Помогать следует настолько, насколько это необходимо для поддержания торса и верхних частей рук в вертикальном положении.
Как отмечалось уже выше, если Вы выполняете сгибания рук на скамье для «молитвы», то наличие помощника обязательно.
Внимание!
Сгибания рук прорабатывают очень небольшие мышцы, которые получают большую нагрузку во время выполнения некоторых базовых упражнений для верхней части тела. По этой причине не зацикливайтесь на сгибаниях рук. В отношении сгибателей рук лучше действовать по принципу «редко, но метко», т.е. если уж Вы делаете сгибания рук, то делайте их чётко, технично. Направьте лучше свою энергию и свои силы в базовые упражнения — именно от прогресса в «больших» упражнениях зависит достижение Ваших целей — будь то красивая внешность или огромная сила.
По этой причине не зацикливайтесь на сгибаниях рук. В отношении сгибателей рук лучше действовать по принципу «редко, но метко», т.е. если уж Вы делаете сгибания рук, то делайте их чётко, технично. Направьте лучше свою энергию и свои силы в базовые упражнения — именно от прогресса в «больших» упражнениях зависит достижение Ваших целей — будь то красивая внешность или огромная сила.
Сгибание разгибание рук в упоре лежа на полу
ВНИМАНИЕ: Вы смотрите текстовую часть содержания конспекта, материал доступен по кнопке Скачать.
Разминка
Упражнения для мышц рук и плечевого пояса: поднимание прямых рук вперед, вверх, в стороны, назад, одновременно, поочередно, последовательно.
Упражнения для мышц туловища и шеи: наклоны головы и туловища вперед, назад, в сторону. Круговые движения головой и туловищем вправо и влево, круговые движения туловищем с набивным мячом или гантелями, поднятыми вверх.
Упражнения для мышц ног: сгибание и разгибание ног, выпады, выпрыгивания из упора присев, пружинящие движения в приседе, прыжки на месте и с продвижением вперед на одной или двух ногах, то же с отягощением (набивные мячи, гантели, гири).
Упражнения для мышц всего тела: движения руками с одновременным наклоном туловища вперед (назад, в сторону), круговые движения туловищем с подниманием рук вверх, упоры присев и лежа, различные повороты, мост из положения стоя спиной к гимнастической стенке, с помощью партнера и самостоятельно, поднимание и опускание гимнастической скамейки с поочередным наклоном туловища вперед и назад, комплексы вольных упражнений.
Выполнение упражнения
Пожарный принимает упор лежа, опирается о пол на уровне плеч и производит полностью отжим от пола на руках, так чтобы они были полностью разогнутыми, далее возвращается на руках в исходное положение, так чтобы, до касания груди пола далее аналогично. При выполнении упражнения туловище должно быть всегда прямым.
Оценка результата
1-я группа:
- 60 раз – отлично;
- 55 раз – хорошо;
- 50 раз – удовлетворительно.
2-я группа:
- 50 раз – отлично;
- 50 раз – хорошо;
- 45 раз – удовлетворительно.
3-я группа:
- 50 раз – отлично;
- 45 раз – хорошо;
- 40 раз – удовлетворительно.
4-я группа:
- 45 раза – отлично;
- 40 раз – хорошо;
- 35 раз – удовлетворительно.
5-я группа:
- 40 раза – отлично;
- 35 раз – хорошо;
- 30 раз – удовлетворительно.
Упражнение 10.
 Сгибание и разгибание рук (эспандер за головой)
Сгибание и разгибание рук (эспандер за головой)Читайте также
Упражнение 1
Упражнение 1 Прими положение стоя на коленях, руки заведены за спину, кисти скрещены на уровне таза.Медленно отводи согнутые в кистях руки
Упражнение 3
Упражнение 3 Позволяет развить гибкость мышц плечевого пояса.Суть упражнения в том, чтобы одна рука преодолевала сопротивление другой. Помести кисть левой руки на правое плечо. Правой рукой ухватись за локоть левой. Старайся достать локтем левой руки до подбородка, а
Упражнение 4
Упражнение 4
Направлено на развитие гибкости дельтовидной мышцы.Вытягивай вверх прямую левую руку, ладонь обращена внутрь.Опуская прямую руку прямо перед собой на уровень плеча, правой рукой сделай упор для левого локтя, слегка на него надавливай. Затем меняй руки
Затем меняй руки
Упражнение 1. Разгибание туловища до прогиба в пояснице
Упражнение 1. Разгибание туловища до прогиба в пояснице Продень ступню правой или левой ноги в ручку эспандера, возьми другую ручку обеими руками. Наклони туловище вперед, чтобы оно приняло горизонтальное положение. Ручка эспандера окажется прижатой к груди.Выпрямись до
Упражнение 3. Сгибание рук в локтях
Упражнение 3. Сгибание рук в локтях Тело прямое, ноги на ширине таза. Продень ступню в ручку эспандера. Свободную ручку захвати снизу.Согни руки в локтях, направляя к плечам, вернись в исходное положение.Вдох на сгибе, выдох на выпрямлении.Повтор 8—10 раз.Сделай 2 подхода,
Упражнение 5. Разгибание руки вверх за спиной
Упражнение 5.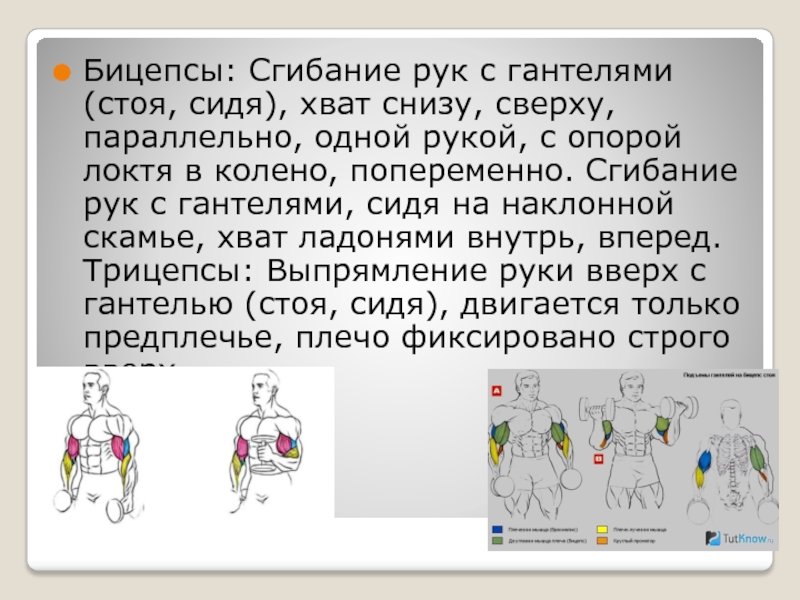 Разгибание руки вверх за спиной
Эспандер за спиной. Правая рука у плеча ладонью вперед. Левая рука прижата к бедру. Разгибай правую руку, выпрямляя ее над головой. Затем возврат в исходное положение.Вдох на разгибании, выдох при возврате в исходное
Разгибание руки вверх за спиной
Эспандер за спиной. Правая рука у плеча ладонью вперед. Левая рука прижата к бедру. Разгибай правую руку, выпрямляя ее над головой. Затем возврат в исходное положение.Вдох на разгибании, выдох при возврате в исходное
Упражнение 6. Разгибание рук в стороны
Упражнение 6. Разгибание рук в стороны Ноги на ширине таза, эспандер за спиной, руки у плеч, ладонями наружу. Разводи руки в стороны, пока они не выпрямятся. Затем возврат в исходное положение.Вдох на разгибании, выдох при возврате в исходное положение.Повтор 10–15 раз.Сделай
Упражнение 11. Сгибание и разгибание рук (эспандер на груди)
Упражнение 11. Сгибание и разгибание рук (эспандер на груди)
Эспандер на уровне груди, левая рука выпрямлена, правая согнута у груди и держит ручку сверху.Разгибай правую руку и возвращайся в исходное положение.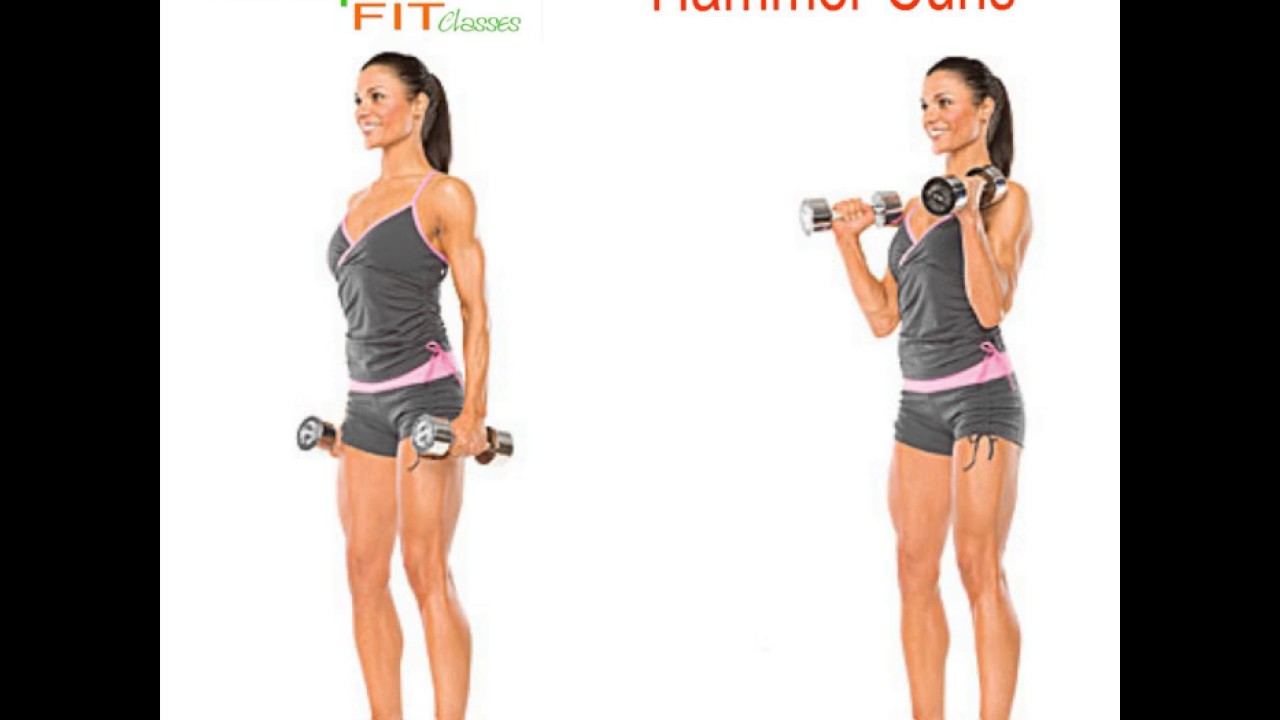 Вдох при разгибании, выдох при возврате в исходное
Вдох при разгибании, выдох при возврате в исходное
Упражнение 12. Разгибание и сгибание ног
Упражнение 12. Разгибание и сгибание ног Лечь на спину, стопа правой ноги продета в ручку эспандера. Сама нога согнута в колене и подтянута к груди. Свободная ручка держится двумя согнутыми у груди руками хватом сверху. Разгибай ногу и возвращайся в исходное положение.Вдох
Упражнение 11. Упражнение для развития мышц ног и таза
Упражнение 11. Упражнение для развития мышц ног и таза Это довольно веселое и шумное упражнение, так что советую тебе подстелить на пол плотный коврик, чтобы не беспокоить соседей.Возьми табурет, залезь на него, спрыгни и затем продолжай совершать прыжки, стараясь достичь
Упражнение 3. Одновременное сгибание рук
Упражнение 3. Одновременное сгибание рук
Это упражнение поможет развить бицепсы.Вес гантелей 3–8 кг.Ноги на ширине таза, руки с гантелями вытянуты вдоль тела ладонями вперед.Сгибай руки к плечам и возвращайся в исходное положение.На сгибе вдох, на выпрямлении
Одновременное сгибание рук
Это упражнение поможет развить бицепсы.Вес гантелей 3–8 кг.Ноги на ширине таза, руки с гантелями вытянуты вдоль тела ладонями вперед.Сгибай руки к плечам и возвращайся в исходное положение.На сгибе вдох, на выпрямлении
Упражнение 4. Разгибание рук из-за головы
Упражнение 4. Разгибание рук из-за головы Упражнение направлено на развитие трицепсов.Вес гантелей 3–5 кг.Ноги вместе, руки с гантелями заведены за голову. Локти направлены вверх, подведены к голове. Разгибай руки вверх, локти при этом неподвижны. После выпрямления снова
Упражнение
Упражнение
Чтобы научить ребенка сохранять равновесие, делайте с ним упражнение для укрепления мышц туловища.
Покажите малышу его любимую игрушку, а затем перемещайте ее то влево, то вправо. Малыш будет стараться дотянуться до нее, сохраняя сидячее положение. Вначале
Вначале
Упражнение
Упражнение Чтобы научить ребенка сохранять равновесие, делайте с ним упражнение для укрепления мышц туловища. Покажите малышу его любимую игрушку, а затем перемещайте ее то влево, то вправо. Малыш будет стараться дотянуться до нее, сохраняя сидячее положение. Вначале
Удары головой
Удары головой К концу первого года жизни малыш иногда начинает сильно и ритмично вертеть головой из стороны в сторону или ударять ею о кроватку. Такие удары очень беспокоят родителей, которые боятся, что ребенок травмирует себя или что у него умственные отклонения. До сих
43. Работаем головой
43. Работаем головой Возраст: 13–15 месяцевУровень сложности: среднийОбласть исследования: двигательные навыкиЭкспериментДля этого эксперимента вам потребуется предмет, который вы могли бы приводить в действие, дотрагиваясь до него лбом, например небольшой светильник
Сгибания рук со штангой стоя
Одним из самых популярных упражнений на развитие мощных мышц рук является сгибание рук со штангой стоя. Оно отлично подходит как новичкам, только недавно пришедшим в тренажёрный зал, так и опытным атлетам, имеющим внушительные мышечные объёмы. Главным достоинством этого упражнения является то, что его можно выполнять в разных вариациях. Это могут быть и классические подъёмы на бицепс, и сгибание рук со штангой стоя обратным хватом, и другие эффективные способы выполнения, о которых более подробно мы расскажем далее.
Оно отлично подходит как новичкам, только недавно пришедшим в тренажёрный зал, так и опытным атлетам, имеющим внушительные мышечные объёмы. Главным достоинством этого упражнения является то, что его можно выполнять в разных вариациях. Это могут быть и классические подъёмы на бицепс, и сгибание рук со штангой стоя обратным хватом, и другие эффективные способы выполнения, о которых более подробно мы расскажем далее.
Какие мышцы будут задействованы?
Когда делаешь данное упражнение, в работу включаются следующие части тела:
- плечелучевые мускулы;
- бицепсы;
- предплечья;
- суставы плеча;
- лопатки.
Классические сгибания рук со штангой стоя на бицепс. Правила выполнения
Чтобы сгибания рук со штангой стоя дали вам максимальный эффект, необходимо делать упражнение в следующей технике:
- Примите положение стоя, поставьте ноги на уровне плеч. Носки слегка поверните в стороны.
- Возьмите снаряд таким хватом, чтобы ладони «смотрели» вверх, а расстояние между ними было чуть шире таза. Если данное положение рук вызывает у вас дискомфорт и препятствует нормальному выполнению упражнения, то хват можно сделать чуть шире или уже (в зависимости от ваших личных предпочтений).
- Начинайте делать сгибание рук со штангой стоя. На выдохе поднимайте снаряд к груди, а затем, немного задержав его в таком положении, плавно опускайте вниз.
- Повторите движение несколько раз.
 Если данное положение рук вызывает у вас дискомфорт и препятствует нормальному выполнению упражнения, то хват можно сделать чуть шире или уже (в зависимости от ваших личных предпочтений).
Если данное положение рук вызывает у вас дискомфорт и препятствует нормальному выполнению упражнения, то хват можно сделать чуть шире или уже (в зависимости от ваших личных предпочтений).Частые ошибки
Несмотря на то, что сгибание рук со штангой в положении стоя кажется простым упражнением, при его выполнении можно совершить множество ошибок, которые могут неблагоприятно отразиться как на результатах спортсмена, так и на его здоровье. Наиболее частые погрешности выглядят следующим образом:
- Неправильный вес штанги. Довольно часто можно встретить новичков, которые из-за своего большого эго берут запредельный вес и в итоге не могут его поднять. В лучшем случаем такое безалаберное выполнение упражнения может привести к отсутствию ожидаемых результатов, в худшем ― к серьёзной травме. Чтобы этого избежать, нужно подбирать такой вес штанги, который был бы тяжёлым, но в то же время не вызывающим дискомфорт во время выполнения. Ориентироваться необходимо на 8-12 чистых повторений без рывков.
- Неправильное положение локтей. Если не держать локти в фиксированном положении, разводить их в разные стороны и всячески изворачивать, чтобы забросить штангу, то бицепсы получат минимальную нагрузку, из-за чего в разы снизится эффективность упражнения.
- Читинг. Ещё одна проблема, которой страдают многие начинающие спортсмены. Пытаясь поднять вес побольше, многие новички начинают идти на различные ухищрения: сильно сгибают ноги в коленных суставах, помогают себе всем корпусом тела, запрокидывают снаряд и так далее. Как и в предыдущей ситуации, в таком выполнении нет какого смысла. Если выполнять сгибания рук со штангой стоя с подтаскиваниями и подкидываниями, то о красивых и эффектных бицепсах можно забыть навсегда.
Рекомендации
Чтобы избежать травм и получить от упражнения максимальный результат, следует придерживаться следующих рекомендаций:
- Во время выполнения держите ноги слегка согнутыми в коленях, чтобы не перегружать поясничные мышцы.
- Поясница должна быть немного прогнутой для снижения риска получения травмы или перегруженности данного отдела.
- Не поднимайте штангу выше уровня плеч, чтобы другие мышечные группы не «съедали» большую часть нагрузки.
- Всегда отдавайте предпочтение правильной технике, а не большому весу.
- Плавно, постепенно, без нарушения в технике прогрессируйте в нагрузках. Помните, что чем сильнее становитесь вы, тем больше становятся ваши мышцы.
- Не тренируйте бицепсы слишком часто. Многие новички в силу своей неопытности руководствуются такой логикой: «Если я буду тренировать руки несколько раз в неделю, то они вырастут гораздо быстрее». На самом деле такой тренинг является прямым путём к перетренированности и застою, которые часто приводят к тому, что спортсмены попросту забрасывают занятия с железом. Не стоит забывать, что бицепсы получают косвенную нагрузку во время тренировок других мышечных групп (например, спины), поэтому тренировать их стоит не более 1-2 раз в неделю.

Обратный хват
Упражнение сгибание рук со штангой стоя обратным хватом (фото данной вариации вы можете увидеть чуть ниже) во многом схоже с классическими подъёмами на бицепс, но имеет некоторые отличия. Если сгибать руки со штангой в таком положении, то можно хорошо проработать плечелучевые мышцы и мышцы предплечья, а также сделать руки более массивными.
Техника выполнения отличается от предыдущего варианта только тем, что в данном случае ладони должны смотреть вниз, а не вверх. Также вместо обычного грифа настоятельно рекомендуется использовать болеё легкую штангу или изогнутый гриф. Это делается из-за того, что основная нагрузка будет идти на плечевую мышцу, которая гораздо слабее бицепса, работающего при нижнем хвате.
Сгибания рук на скамье Ларри Скотта
Как уже говорилось ранее, сгибания рук со штангой стоя задействуют не только бицепсы, но и другие мышечные группы. Чтобы акцентировано и без читинга проработать одни только бицепсы, используется скамья Ларри Скотта.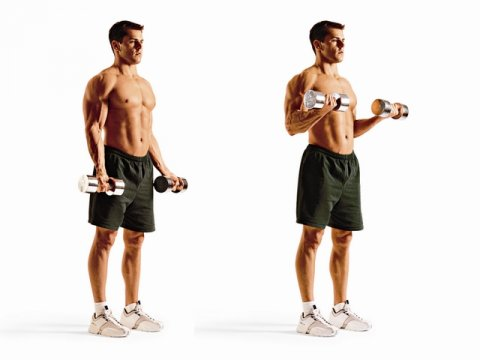
Техника выполнения подъёма штанги на данном приспособлении такова:
- Возьмите изогнутую штангу и положите руки на скамью. Подмышки должны плотно прилегать к пюпитру, а локти не должны от него отрываться.
- На вдох делаете подъём, задержав несколько секунд в верхней точке, на выдох ― плавное опускание.
- Как и в случае с другими вариациями, повторите данное движение 8-12 раз.
Итог
Сгибание рук со штангой стоя ― упражнение, благодаря которому можно получить хорошо развитые бицепсы. Выполняя его в комплексе с другими упражнениями, можно достичь больших успехов в построении больших и развитых мышц рук.
Но не стоит забывать о том, что бицепсы ― это далеко не единственные мышцы в нашем организме. Чтобы построить красивое и эстетичное тело, нужно тренировать всё. Для достижения максимального результата необходимо подвергать нагрузке грудь, трицепсы, ноги, а также другие мускулы. Тренировки бицепсов должны комбинироваться с тренингом иных мышечных групп. Также они не должны быть слишком частыми.
Также они не должны быть слишком частыми.
Ни в коем случае нельзя забывать о правильном питании. Если употреблять одни только булочки, конфетки, жареные продукты и прочую вредную пищу, то не стоит удивляться отсутствию результатов. Рацион спортсмена должен состоять из натуральных белков и углеводов, которые «строили» бы его мышцы и заряжали организм необходимой энергией.
Технично тренируйтесь, правильно питайтесь, хорошо отдыхайте, и тогда ваши бицепсы будут большими и массивными!
Сгибание рук с гантелями на бицепс поочередно стоя | by BEST fit
Сгибание рук на бицепс со штангой либо гантелями– это универсальное упражнение для проработки мышц бицепса.Оно не требует использования сложного оборудования, поэтому может выполняться и в домашних условиях при наличии утяжеления.
Тип Механика Оборудование Силовое Изолирующее Гантели
Техника выполнения — как правильно делать упражнение
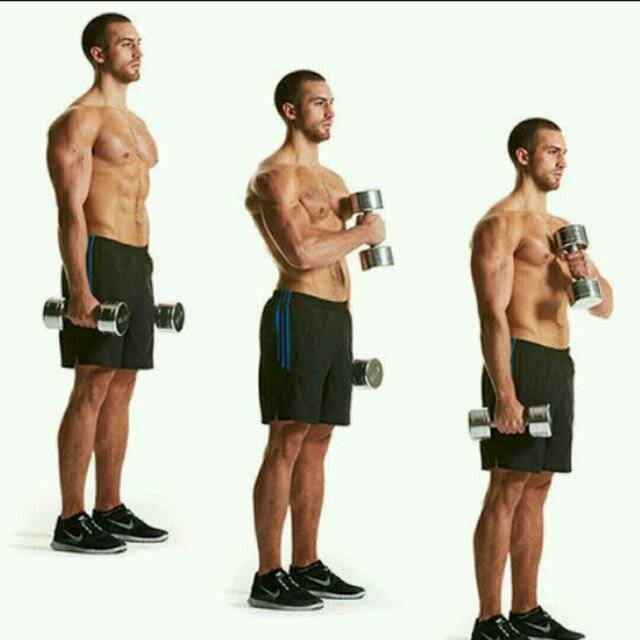
- Встаньте ровно, держите корпус вертикально, гантели находятся в руках, локти прижаты к туловищу, а ладони обращены внутрь.
- Удерживая руки выше локтя в неподвижном положении, согните правую руку с гантелью, одновременно разворачивая ладонь вверх. Движение осуществляется на выдохе до полного сокращения бицепса (при этом гантель находится на уровне плеч). Задержитесь в этом положении на секунду и напрягите бицепс. Совет: в данном упражнении двигаются только предплечья.
- Медленно верните гантель в исходное положение, движение осуществляется на вдохе. Совет: Помните, что в нижней точке ладонь необходимо развернуть в исходное положение (к бедру).
- Повторите упражнение с левой рукой. Сгибания обеими руками считаются за один повтор.
- Продолжайте упражнение, чередуя руки, пока не выполните рекомендованное количество повторений.
Варианты выполнения:
- Есть много вариантов для этого упражнения. Например, вы можете выполнять поочередное сгибание с гантелями на бицепс сидя на скамейке, с поддержкой спины или без нее. Кроме того, упражнение может выполняться и обеими руками одновременно. Существует вариант выполнения поочередного сгибания на бицепс, когда обе ладони направлены вверх в нижней точке амплитуды.
- Вы можете также осуществлять супинацию (вращение кистей) во время выполнения подъема на бицепс. В верхней части движения ладонь должна быть обращена вперед, а мизинец должен быть выше большого пальца для обеспечения пикового сокращения.
 Существует вариант выполнения поочередного сгибания на бицепс, когда обе ладони направлены вверх в нижней точке амплитуды.
Существует вариант выполнения поочередного сгибания на бицепс, когда обе ладони направлены вверх в нижней точке амплитуды.Какие мышцы работают при сгибаниях рук с гантелями поочередно стоя
Основная нагрузка:
Дополнительная нагрузка:
- плечевая и плечелучевая мышцы.
Сгибание и разгибание рук в упоре лежа на полу — ПОЖАРНЫЕ РЕБЯТА
Сгибание и разгибание рук в упоре лежа на полу
1. Вступительная часть.
- построение л/с.
- проверка внешнего вида, снаряжения.
- объявление темы и цели занятия и объяснение ТБ
Инструктаж по ОТ и ТБ:
- упражнения выполняются в спортивной форме;
- к занятиям допускаются лица, прошедшие ежегодное мед. освидетельствование;
- тщательно выбрать и подогнать спорт. обувь;
- оказать первую мед. помощь при возникновении несчастного случая;
- разминка.
2. Подготовительная часть.
Общее укрепление организма и разминка перед основной частью занятия.
| 1 | Исходное положение (И.П.) – стоя, ноги на ширине плеч, руки опущены, круговое движение головой влево и вправо | 5 раз | Упражнение для мышц шеи |
| 2 | И.П. – стоя, ноги на ширине плеч, руки опущены круговые движения плечами вперед и назад | 5 раз | Упражнения для разминки мышц спины |
| 3 | И.П. – стоя, ноги на ширине плеч, руки опущены, круговые движения руками вперед и назад. | 10 раз | Упражнение для мышц плечевого пояса |
| 4 | И.П. – стоя, ноги на ширине плеч, руки на поясе, круговые движения туловищем влево вправо И.П. – стоя, ноги на ширине плеч, руки на поясе, круговые движения тазобедренного сустава вправо-влево | 10 раз10 раз. | Упражнения для разминки мышц таза |
| 5 | И.П. – в упоре лежа, руки на ширине плеч, ноги опираются на носки, сгибание, разгибание рук | 10 раз | Упражнения для мышц груди |
| 6 | И.П. – сид углом, руки в упоре сзади, сгибание-разгибание ног | 10 раз | Упражнение для мышц пресса |
| 7 | И.П. – стоя, ноги на ширине плеч, выпрыгивание вверх, толкаясь двумя ногами, подтягивая колени к груди. | 5 раз | Упражнения для мышц бедра |
| 8 | И.П. – ноги на ширине плеч, руки опущены, пружинящие наклоны вперед, пальцами рук доставать пол, ноги в коленях не сгибать | 10 наклонов | Упражнения на растяжение мышц |
3. Основная часть
Для занятий и сдачи нормативов по физической подготовке личный состав распределяется на следующие возрастные группы:
| Возрастная группа | Мужчины |
| 1 | до 25 лет |
| 2 | от 25 до 30 лет |
| 3 | от 30 до 35 лет |
| 4 | от 35 до 40 лет |
| 5 | от 40 до 45 лет |
| 6 | от 45 до 50 лет |
| 7 | от 50 лет и старше |
(Пункт в редакции, введенной в действие с 4 сентября 2016 года приказом МЧС России от 26 июля 2016 года № 402)
Сгибание и разгибание рук в упоре лежа на полу.
Выполняется из исходного положения упор лежа (ноги вместе, тело прямое). Согнуть руки до касания грудью пола, разгибая руки, принять упор лежа. Упражнение выполняется без остановки. (Пункт в редакции, введенной в действие с 4 сентября 2016 года приказом МЧС России от 26 июля 2016 года № 402)
| Упражнения | Оценка | Возрастные группы (мужчины) | ||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | ||
| 3. Сгибание и разгибание рук в упоре лежа на полу (кол-во раз) | удовлетворительно | 50 | 45 | 40 | 35 | 30 | 25 | 20 |
| хорошо | 55 | 50 | 45 | 40 | 35 | 30 | 25 | |
| отлично | 60 | 55 | 50 | 45 | 40 | 35 | 30 | |
Внимание!!! Если документ не открылся, обновите страницу, возможно несколько раз. Для удобного чтения разверните документ кликнув на иконку в правом верхнем углу.
Прямые руки или согнутые? Для прогулок понятно. Для бега меньше | Биология
Вопрос, который, пожалуй, задаст и попытается ответить только ученый: почему мы ходим с прямыми руками, а бежим с согнутыми?
Спустя несколько месяцев после того, как Эндрю Егиану пришла в голову загадка, когда он прогуливался по кампусу Гарварда, у него есть часть ответа.
Он попросил добровольцев пройтись по беговой дорожке в кислородной маске и обнаружил, что они тратят на 11% больше энергии, сгибая руки, чем держа их прямо.
При сгибании рук количество потребляемого кислорода увеличилось в среднем с 643 мл в минуту до 712 мл в минуту, что свидетельствует о явном преимуществе ходьбы с прямыми руками.
В исследовании, опубликованном в Журнале экспериментальной биологии, приняли участие восемь студентов, которые варьировались от заядлых марафонцев до людей, которые бегают всего пару раз в неделю.
Участники были снабжены светоотражающими маркерами на плечах, локтях и запястьях, чтобы отслеживать их движения. Каждого попросили пробежать и пройтись по беговой дорожке, один раз с прямыми руками, а другой с согнутыми.
«Сгибание руки уменьшает энергию, которую вам нужно тратить на плечо, но увеличивает энергию, которую вам нужно тратить на локоть», — сказал Йегиан.
Йегиан и его команда подозревали, что сгибание рук будет более эффективным при беге, но предположение оказалось неверным. «Самое удивительное, что мы обнаружили одинаковые затраты на бег с прямой и согнутой рукой», — сказал он.
Исследователи признают, что не знают, почему бегуны склонны сгибать руки, но Йегиан убежден, что в этом есть некоторая польза.Возможно, согнутые руки помогают стабилизировать голову при беге, сказал он. Предыдущие исследования показали, что это может помочь бегунам сохранять равновесие.
В исследовании Йегиана учитывалась только одна скорость бега, поэтому при более быстром беге расход энергии может быть другим.
«Теперь у нас есть довольно хорошее представление о том, что энергия — это то, почему мы держим руки прямо, когда мы идем, и, вероятно, есть конкретная причина сгибать руки во время бега», — сказал Егиан. Он планирует провести дополнительные исследования по этому вопросу.
Кристофер Арельяно, изучающий биомеханику в спорте в Университете Хьюстона и не участвовавший в исследовании, сказал, что люди «довольно умны» в экономии энергии, поэтому первоначальное предположение Йегиана о том, что сгибание рук помогает бегунам, имело смысл.
Вывод о том, что это, по-видимому, мало что меняет, оставил большую часть загадки без ответа. «Остается вопрос: какое преимущество имеет сгибание рук во время бега человека?» — сказал Арельяно.
Что делает раннее сгибание рук?
Одним из самых больших препятствий для мощности и скорости вертикального грифа является раннее сгибание рук.Те из вас, кто борется с ранним сгибанием рук, знают, насколько болезненна эта вредная привычка. Сгибание рук в рывке ИЛИ взятии штанги на грудь до того, как штанга достигнет максимальной скорости, только замедляет движение штанги и изменяет ее траекторию.
Вот два видео, на которых атлет сгибает руки в начале рывка. Первая — это полная скорость, а вторая — мой анализ.
Полная скорость
Анализ
В этих видеороликах вы заметите, что атлет значительно сгибает руки, что препятствует его подъему.Как только его руки сгибаются, он изо всех сил пытается оставаться в первом рывке, пятки касаются земли. Это потому, что теперь он снял нагрузку с ног и попытался усилить перекладину руками. Во-вторых, вы заметите, что из-за того, что его руки согнуты, он не может применить силу вертикально к штанге. Если бы он применил вертикальную силу, его руки просто выпрямились бы, и он ничего бы не добился. Таким образом, чтобы компенсировать эту неспособность, он перемещает свои бедра горизонтально в перекладину и чрезмерно поворачивает плечи за перекладиной, что заставляет перекладину раскачиваться перед ним. Все началось с того, что он рано согнул руки.
Все началось с того, что он рано согнул руки.
В этот момент некоторые из вас смотрят это видео и видят себя в зеркале. Вы хотите знать, как это исправить. Короче говоря, способ избавиться от вредных привычек — это ВСЕГДА идеальные повторения, независимо от веса. Однако есть также два упражнения, которые имеют тенденцию оказывать длительное воздействие на эту вредную привычку. Высокий рывок/высокий толчок чрезвычайно эффективны, так как у вас нет времени сгибать руки, и вы вынуждены делать второй толчок плечами и бедрами.Кроме того, совмещение тяги с упражнениями оказывает огромное влияние. Под этим я подразумеваю выполнение комбо, в котором вы делаете рывок или толчок на 1-2 повторения с совершенно прямыми руками, а затем выполняете полное движение, пытаясь имитировать тягу. Пример (игнорировать начальную позицию). Эта комбинация создаст правильную схему движения руками, прежде чем завершить полное движение.
Суть в том, что раннее сгибание рук является убийцей мощности и для большинства из них снижает ваш потенциал на 10-20 кг.
О, это просто потрясающе… Линдси Валенсуэла Чистая лестница из OC Throwdown
Нравится:
Нравится Загрузка…
Растяжимая роботизированная рука-оригами, способная изгибаться и вращаться во всех направлениях
Значение
Осьминог быстро меняет конфигурацию своих рук для выполнения комплексных задач, таких как плавание, ходьба и добыча. Вдохновленные такой биосистемой головоногих с мягким телом, мы разрабатываем совместимые роботизированные руки-оригами для достижения мультимодальных деформаций, которые объединяют растяжение, складывание, всенаправленный изгиб и скручивание для таких функций, как захват и подъем объектов с помощью точного магнитного срабатывания.Дистанционное управление магнитным полем позволяет распределенно активировать роботизированную систему с несколькими степенями свободы для сложных движений для достижения вышеупомянутых возможностей и функций изменения формы. Роботы-манипуляторы Origami с отвязанным управлением применимы к биомедицинским устройствам и механизмам трансформации в средах с ограниченным доступом.
Abstract
Вдохновленные воплощенным разумом, наблюдаемым в руках осьминога, мы представляем роботизированные руки-оригами с магнитным управлением, основанные на шаблонах Креслинга для мультимодальных деформаций, включая растяжение, складывание, всенаправленный изгиб и скручивание.Высокоинтегрированное движение манипуляторов связано с присущими реконфигурируемому устройству Креслинга свойствами, чье контролируемое бистабильное развертывание/складывание и всенаправленное изгибание достигаются за счет точного магнитного срабатывания. Мы исследуем одно- и многоблочные роботизированные системы, последние проявляют большее биомиметическое сходство с руками осьминога. Мы начнем с одного узла Kresling, чтобы очертить рабочий механизм магнитного срабатывания для развертывания/складывания и изгиба.Сборка Kresling, состоящая из двух частей, демонстрирует базовое интегрированное движение, сочетающее всенаправленный изгиб с развертыванием. Сборка Kresling из четырех частей представляет собой роботизированную руку с большим углом изгиба во всех направлениях и способностью к растяжению. В основе базового интегрированного движения масштабируемость узлов Kresling демонстрируется за счет распределенного магнитного срабатывания двузначного числа единиц, что позволяет роботизированным рукам выполнять сложные движения, такие как непрерывное растяжение и сжатие, реконфигурируемый изгиб и многоосное скручивание.Такие сложные движения позволяют выполнять функции, имитирующие руки осьминога, которые хватают объекты и манипулируют ими. Роботизированный манипулятор Kresling с бесконтактным приводом обеспечивает особый механизм для приложений, требующих синергетических роботизированных движений для навигации, обнаружения и взаимодействия с объектами в средах с ограниченным или ограниченным доступом. На основе небольших роботизированных манипуляторов Kresling можно разработать миниатюрные медицинские устройства, такие как трубки и катетеры, в сочетании с процедурами эндоскопии, интубации и катетеризации с использованием функций манипулирования объектами и движения под дистанционным управлением.
В основе базового интегрированного движения масштабируемость узлов Kresling демонстрируется за счет распределенного магнитного срабатывания двузначного числа единиц, что позволяет роботизированным рукам выполнять сложные движения, такие как непрерывное растяжение и сжатие, реконфигурируемый изгиб и многоосное скручивание.Такие сложные движения позволяют выполнять функции, имитирующие руки осьминога, которые хватают объекты и манипулируют ими. Роботизированный манипулятор Kresling с бесконтактным приводом обеспечивает особый механизм для приложений, требующих синергетических роботизированных движений для навигации, обнаружения и взаимодействия с объектами в средах с ограниченным или ограниченным доступом. На основе небольших роботизированных манипуляторов Kresling можно разработать миниатюрные медицинские устройства, такие как трубки и катетеры, в сочетании с процедурами эндоскопии, интубации и катетеризации с использованием функций манипулирования объектами и движения под дистанционным управлением.
По сравнению с традиционными манипуляторами, в которых жесткие звенья соединены шарнирами для обеспечения вращательных и поступательных степеней свободы (степеней свободы), мягкие аналоги у головоногих, например, руки осьминога, демонстрируют интересные особенности, такие как большие и непрерывные деформации, возможность регулировки уступчивость и проворные движения для перемещения и охоты (1). Вдохновленные такими биосистемами, были изучены податливые механизмы, такие как складное оригами, поскольку они позволяют преобразовывать плоские материалы или структуры в сложные трехмерные (3D) архитектуры в различных масштабах для движений роботов (2, 3), которые могут применяться в инженерных областях. включая трансформирующиеся структуры (4⇓⇓–7), биомедицинские устройства (8, 9), аэрокосмическую промышленность (10, 11) и электронику (12⇓–14).Были изучены различные механизмы оригами для роботизированных рук для выполнения таких движений, как сокращение (15, 16), развертывание (17⇓–19), сгибание (20, 21) и скручивание (22, 23). Эти движения были продемонстрированы для различных функций, например захвата объекта и биопсии (24⇓⇓⇓–28). Тем не менее, движениям большинства существующих роботов-манипуляторов оригами препятствуют ограниченные степени свободы, такие как только сокращение/развертывание (29), однонаправленное изгибание (30) и двунаправленное изгибание (31). Хотя некоторые системы были разработаны с ограниченными интегрированными движениями с несколькими степенями свободы, они, как правило, полагаются на несколько громоздких приводов и/или проводных приводов, например, двигатели (22, 23, 32) и пневматические насосы (33), которые значительно ограничивают эксплуатационная гибкость и универсальность манипулятора в суровых условиях с ограниченным доступом человека и машин.В связи с этими существующими проблемами очень желателен дистанционно активируемый механизм оригами, который может обеспечить подвижную деформацию с несколькими степенями свободы для интегрированного большого сокращения / развертывания, всенаправленного изгиба и скручивания.
Эти движения были продемонстрированы для различных функций, например захвата объекта и биопсии (24⇓⇓⇓–28). Тем не менее, движениям большинства существующих роботов-манипуляторов оригами препятствуют ограниченные степени свободы, такие как только сокращение/развертывание (29), однонаправленное изгибание (30) и двунаправленное изгибание (31). Хотя некоторые системы были разработаны с ограниченными интегрированными движениями с несколькими степенями свободы, они, как правило, полагаются на несколько громоздких приводов и/или проводных приводов, например, двигатели (22, 23, 32) и пневматические насосы (33), которые значительно ограничивают эксплуатационная гибкость и универсальность манипулятора в суровых условиях с ограниченным доступом человека и машин.В связи с этими существующими проблемами очень желателен дистанционно активируемый механизм оригами, который может обеспечить подвижную деформацию с несколькими степенями свободы для интегрированного большого сокращения / развертывания, всенаправленного изгиба и скручивания.
Оригами Креслинга, созданное путем выгибания тонких цилиндрических оболочек (34, 35), является идеальным строительным блоком для робота-манипулятора оригами благодаря присущей ему способности мультимодальной деформации, обеспечивающей развертывание/складывание и изгибание. Как показано на фиг. 1 A , складывание/раскладывание вызывается крутящим моментом Ti в плоскости, а изгибание индуцируется внеплоскостным крутящим моментом To.В плоскости и вне плоскости определяются относительно плоскости недеформированной шестиугольной плоскости. Бистабильное оригами Креслинга с устойчивым сложенным состоянием [0] и стабильным развернутым состоянием [1] достигается с помощью геометрического дизайна (36) ( SI Приложение , рис. S1). При приложении положительного плоскостного крутящего момента (направление против часовой стрелки) сложенный блок (устойчивое состояние [0]) постепенно разворачивается с увеличением крутящего момента и после преодоления энергетического барьера защелкивается в устойчивое состояние [1] (рис. 1 В ). Точно так же развернутый блок может вернуться в стабильное состояние [0] под действием отрицательного крутящего момента ( SI Приложение , рис. S2). Когда к верхнему шестиграннику узла Креслинга прикладывается внеплоскостной крутящий момент, он изгибается под углом θ, определяемым как угол между горизонтальным направлением и верхним шестигранником (рис. 1 C и SI Приложение). , рис. S3). Угол изгиба увеличивается с приложенным внеплоскостным крутящим моментом и имеет максимальное значение из-за геометрических ограничений шаблона.Как обсуждалось выше, направление и плоскость приложенного крутящего момента вместе определяют режим деформации оригами Креслинга: складывание/развертывание или изгибание. Чтобы реализовать быстро переключаемые режимы деформации, мы вводим магнитное срабатывание (37⇓⇓–40) для эффективного и дистанционного управления мгновенным сдвигом направления крутящего момента и плоскости крутящего момента для высокоинтегрированных сложных движений, которые не были достигнуты с помощью обычных стратегий срабатывания.
1 В ). Точно так же развернутый блок может вернуться в стабильное состояние [0] под действием отрицательного крутящего момента ( SI Приложение , рис. S2). Когда к верхнему шестиграннику узла Креслинга прикладывается внеплоскостной крутящий момент, он изгибается под углом θ, определяемым как угол между горизонтальным направлением и верхним шестигранником (рис. 1 C и SI Приложение). , рис. S3). Угол изгиба увеличивается с приложенным внеплоскостным крутящим моментом и имеет максимальное значение из-за геометрических ограничений шаблона.Как обсуждалось выше, направление и плоскость приложенного крутящего момента вместе определяют режим деформации оригами Креслинга: складывание/развертывание или изгибание. Чтобы реализовать быстро переключаемые режимы деформации, мы вводим магнитное срабатывание (37⇓⇓–40) для эффективного и дистанционного управления мгновенным сдвигом направления крутящего момента и плоскости крутящего момента для высокоинтегрированных сложных движений, которые не были достигнуты с помощью обычных стратегий срабатывания. (31, 32). В следующих разделах демонстрируются изящные конструкции магнитных структур Креслинга и точный контроль приложенного магнитного поля, роботизированные руки-оригами со встроенными мультимодальными деформациями для сильного сжатия/развертывания, всенаправленного изгиба и скручивания.Между тем, магнитное срабатывание позволяет создавать небольшие роботизированные руки с возможностью гибкого всенаправленного изгиба и комплексных движений, что позволяет разрабатывать миниатюрные медицинские устройства в замкнутых биомедицинских средах, таких как желудок, кишечник, трахея и бронхи.
(31, 32). В следующих разделах демонстрируются изящные конструкции магнитных структур Креслинга и точный контроль приложенного магнитного поля, роботизированные руки-оригами со встроенными мультимодальными деформациями для сильного сжатия/развертывания, всенаправленного изгиба и скручивания.Между тем, магнитное срабатывание позволяет создавать небольшие роботизированные руки с возможностью гибкого всенаправленного изгиба и комплексных движений, что позволяет разрабатывать миниатюрные медицинские устройства в замкнутых биомедицинских средах, таких как желудок, кишечник, трахея и бронхи.
Исполнительные механизмы магнитного узла Креслинга для складывания/раскладывания, двунаправленного изгиба и всенаправленного изгиба. ( A ) Режимы деформации складывания/развертывания и изгиба оригами Креслинга, вызванные крутящими моментами в плоскости и вне плоскости, соответственно.( B ) Механическая характеристика процессов складывания и развертывания. На изображениях показан сложенный модуль (стабильное состояние [0]) и развернутый модуль (стабильное состояние [1]). ( C ) Механическая характеристика поведения при изгибе. Точки взяты из экспериментальных измерений, подобранных полиномиальной функцией. C , Врезки представляют собой изображения узла с разными углами изгиба. ( D ) Магнитный креслинг с наклонным намагничиванием (60°) как для складывания/развертывания, так и для всенаправленного изгиба.( E ) Приводной механизм складывания/раскладывания, индуцированный намагниченностью в плоскости Mi и магнитным полем в плоскости B. ( F ) Фазовая диаграмма, показывающая условия магнитного поля для переключения узла Креслинга с наклонной намагниченностью из сложенного состояния (стабильное состояние [0]) в развернутое состояние (стабильное состояние [1]). Точки взяты из экспериментальных измерений, подобранных полиномиальной функцией. ( G ) Приводной механизм двунаправленного изгиба, вызванный намагниченностью в плоскости Mi и внеплоскостным магнитным полем B.( H ) Приводной механизм всенаправленного изгиба, вызванный внеплоскостной намагниченностью Mo и магнитным полем в плоскости B.
( C ) Механическая характеристика поведения при изгибе. Точки взяты из экспериментальных измерений, подобранных полиномиальной функцией. C , Врезки представляют собой изображения узла с разными углами изгиба. ( D ) Магнитный креслинг с наклонным намагничиванием (60°) как для складывания/развертывания, так и для всенаправленного изгиба.( E ) Приводной механизм складывания/раскладывания, индуцированный намагниченностью в плоскости Mi и магнитным полем в плоскости B. ( F ) Фазовая диаграмма, показывающая условия магнитного поля для переключения узла Креслинга с наклонной намагниченностью из сложенного состояния (стабильное состояние [0]) в развернутое состояние (стабильное состояние [1]). Точки взяты из экспериментальных измерений, подобранных полиномиальной функцией. ( G ) Приводной механизм двунаправленного изгиба, вызванный намагниченностью в плоскости Mi и внеплоскостным магнитным полем B.( H ) Приводной механизм всенаправленного изгиба, вызванный внеплоскостной намагниченностью Mo и магнитным полем в плоскости B. ( I ) Полярный график и экспериментальные изображения, показывающие углы изгиба во всех направлениях. Приложенное магнитное поле перпендикулярно осевому направлению недеформированного блока с наклонной намагниченностью. Серая область обозначает условия, при которых сложенный блок разворачивается.
( I ) Полярный график и экспериментальные изображения, показывающие углы изгиба во всех направлениях. Приложенное магнитное поле перпендикулярно осевому направлению недеформированного блока с наклонной намагниченностью. Серая область обозначает условия, при которых сложенный блок разворачивается.
Результаты и обсуждение
Мультимодальная деформация узла Креслинга под действием магнитного воздействия.
Здесь мы используем магнитное срабатывание, чтобы обеспечить крутящий момент как для складывания/развертывания, так и для всенаправленного изгиба узла Креслинга, просто прикрепляя магнитную пластину к его верхней плоскости и приводя в действие хорошо контролируемые трехмерные магнитные поля (36) (Фильм S1 и Приложение SI , рис. S4). Магнитный крутящий момент создается, когда намагниченность магнитной пластины пытается выровняться с приложенным магнитным полем. Как только намагниченность установлена, направление и интенсивность результирующего крутящего момента можно контролировать, настраивая направление и интенсивность приложенного магнитного поля. На рис. 1 D показан пример магнитного узла Креслинга с наклонной намагниченностью под углом 60° по отношению к верхней плоскости узла Креслинга. В этом случае узел Креслинга может обеспечить как складывание/развертывание, так и всенаправленный изгиб под действием различных запрограммированных магнитных полей B, так как намагниченность M имеет как плоскую составляющую намагниченности Mi, так и внеплоскостную составляющую намагниченности Mo. Рис. 1 E иллюстрирует механизм складывания/развертывания узла Креслинга, который приписывается плоскостной намагниченности Mi под действием плоскостного магнитного поля B, при этом начальный угол между Mi и B равен α.Это приводит к плоскостному крутящему моменту Ti=V(Mi×B) для складывания или развертывания устройства (Фильм S1), где V — объем магнитной пластины. Фазовая диаграмма на рис. 1 F диктует экспериментальные условия для развертывания блока Креслинга из стабильного состояния [0] (оранжевая область) в стабильное состояние [1] (белая область), где B — интенсивность B Кроме того, в Приложении SI , рис.
На рис. 1 D показан пример магнитного узла Креслинга с наклонной намагниченностью под углом 60° по отношению к верхней плоскости узла Креслинга. В этом случае узел Креслинга может обеспечить как складывание/развертывание, так и всенаправленный изгиб под действием различных запрограммированных магнитных полей B, так как намагниченность M имеет как плоскую составляющую намагниченности Mi, так и внеплоскостную составляющую намагниченности Mo. Рис. 1 E иллюстрирует механизм складывания/развертывания узла Креслинга, который приписывается плоскостной намагниченности Mi под действием плоскостного магнитного поля B, при этом начальный угол между Mi и B равен α.Это приводит к плоскостному крутящему моменту Ti=V(Mi×B) для складывания или развертывания устройства (Фильм S1), где V — объем магнитной пластины. Фазовая диаграмма на рис. 1 F диктует экспериментальные условия для развертывания блока Креслинга из стабильного состояния [0] (оранжевая область) в стабильное состояние [1] (белая область), где B — интенсивность B Кроме того, в Приложении SI , рис. С5. Плоскостная намагниченность Mi также может обеспечивать двунаправленный изгиб под действием неплоскостного магнитного поля B, как показано на рис. 1 G . Когда B прикладывается с начальным углом β к Mi, внеплоскостной крутящий момент To=V(Mi×B) приводит к двунаправленному изгибу блока Креслинга (рис. 1 G и фильм S1). Всенаправленная деформация изгиба зависит от внеплоскостной составляющей намагниченности Mo, как показано на рис. 1 H . Поскольку внеплоскостные магнитные моменты To=V(Mo×B) могут создаваться B в любых направлениях, не совпадающих с Mo, направление изгиба блока Креслинга определяется направлением поля, которое является всенаправленным (Movie С1).Следует отметить, что если магнитная пластина обладает только неплоской намагниченностью, угол изгиба будет однородным под действием приложенного в плоскости вращающегося магнитного поля. При наклонном намагничивании под углом 60° (сочетание плоскостного и внеплоскостного намагничивания) всенаправленный угол изгиба узла Креслинга показан на рис.
С5. Плоскостная намагниченность Mi также может обеспечивать двунаправленный изгиб под действием неплоскостного магнитного поля B, как показано на рис. 1 G . Когда B прикладывается с начальным углом β к Mi, внеплоскостной крутящий момент To=V(Mi×B) приводит к двунаправленному изгибу блока Креслинга (рис. 1 G и фильм S1). Всенаправленная деформация изгиба зависит от внеплоскостной составляющей намагниченности Mo, как показано на рис. 1 H . Поскольку внеплоскостные магнитные моменты To=V(Mo×B) могут создаваться B в любых направлениях, не совпадающих с Mo, направление изгиба блока Креслинга определяется направлением поля, которое является всенаправленным (Movie С1).Следует отметить, что если магнитная пластина обладает только неплоской намагниченностью, угол изгиба будет однородным под действием приложенного в плоскости вращающегося магнитного поля. При наклонном намагничивании под углом 60° (сочетание плоскостного и внеплоскостного намагничивания) всенаправленный угол изгиба узла Креслинга показан на рис. 1 I . Обратите внимание, что плоская составляющая намагниченности Mi может влиять на угол изгиба, когда плоскостная развертка B качается с постоянной интенсивностью (от 10 до 40 мТл с шагом 10 мТл).С увеличением напряженности магнитного поля θ увеличивается во всех направлениях, но изгиб на 180° выше из-за влияния Mi. Когда приложенное магнитное поле еще больше возрастет и магнитный момент в плоскости достигнет критического значения, блок может развернуться при определенных условиях магнитного поля, обозначенных серой областью на рис. 1 I . Неоднородный угол изгиба можно компенсировать, применяя переменное магнитное поле. Кроме того, угол изгиба можно увеличить, отрегулировав угол между Mo и B ( SI, Приложение , рис.С6).
1 I . Обратите внимание, что плоская составляющая намагниченности Mi может влиять на угол изгиба, когда плоскостная развертка B качается с постоянной интенсивностью (от 10 до 40 мТл с шагом 10 мТл).С увеличением напряженности магнитного поля θ увеличивается во всех направлениях, но изгиб на 180° выше из-за влияния Mi. Когда приложенное магнитное поле еще больше возрастет и магнитный момент в плоскости достигнет критического значения, блок может развернуться при определенных условиях магнитного поля, обозначенных серой областью на рис. 1 I . Неоднородный угол изгиба можно компенсировать, применяя переменное магнитное поле. Кроме того, угол изгиба можно увеличить, отрегулировав угол между Mo и B ( SI, Приложение , рис.С6).
Интегрированное движение всенаправленного изгиба и развертывания.
Несмотря на то, что в сложенном состоянии модуль Kresling может эффективно разворачиваться или сгибаться, он не может разворачиваться и сгибаться одновременно. Поэтому мы используем двухэлементные сборки Креслинга, чтобы показать основную концепцию интегрированного движения, которое сочетает в себе изгибание Креслинга с развертыванием, реализуемое за счет распределенного срабатывания магнитного поля. На рис. 2 показаны три двухблочных узла Креслинга с различными комбинациями намагниченности, которые создаются путем прикрепления двух магнитных пластин к верхней части двух узлов Креслинга.На рис. 2 A показана первая комбинация намагниченности, где обе магнитные пластины спроектированы с плоскостными намагничиваниями Mi вдоль одного и того же направления вправо в полностью сложенном состоянии [00]. Обратите внимание, что двоичный код представляет состояние сборки, где первая и вторая цифры соответствуют нижнему и верхнему элементам соответственно. Когда плоскостное магнитное поле B приложено под углом α к направлению вправо (направление Mi в состоянии [00]), на обеих магнитных пластинах генерируются плоскостные магнитные моменты, заставляющие сборку трансформироваться между четырьмя стабильные состояния посредством стабильного свертывания и развертывания (Movie S2 и SI, Приложение , рис.
Поэтому мы используем двухэлементные сборки Креслинга, чтобы показать основную концепцию интегрированного движения, которое сочетает в себе изгибание Креслинга с развертыванием, реализуемое за счет распределенного срабатывания магнитного поля. На рис. 2 показаны три двухблочных узла Креслинга с различными комбинациями намагниченности, которые создаются путем прикрепления двух магнитных пластин к верхней части двух узлов Креслинга.На рис. 2 A показана первая комбинация намагниченности, где обе магнитные пластины спроектированы с плоскостными намагничиваниями Mi вдоль одного и того же направления вправо в полностью сложенном состоянии [00]. Обратите внимание, что двоичный код представляет состояние сборки, где первая и вторая цифры соответствуют нижнему и верхнему элементам соответственно. Когда плоскостное магнитное поле B приложено под углом α к направлению вправо (направление Mi в состоянии [00]), на обеих магнитных пластинах генерируются плоскостные магнитные моменты, заставляющие сборку трансформироваться между четырьмя стабильные состояния посредством стабильного свертывания и развертывания (Movie S2 и SI, Приложение , рис. С7). Из фазовой диаграммы на рис. 2 B , начиная с устойчивого состояния [00], стабильные состояния [10] и [11] могут быть непосредственно достигнуты при программировании напряженности магнитного поля B и направления α. Стабильное состояние [01] может быть достигнуто после стабильного состояния [11] ( SI Приложение , рис. S8). Двунаправленное искривление состояний [00], [10] и [01] под действием внеплоскостного магнитного поля под углом β к горизонтальному направлению показано на рис. 01], демонстрируя комплексные деформации изгиба и развертывания (видео S2).Обратите внимание, что развернутый блок не может сгибаться под действием приложенного магнитного поля. На рис. 2 D показаны экспериментальные измерения углов изгиба (состояния [00], [10] и [01]) в магнитном поле 30 мТл с различными направлениями (β в диапазоне от −180° до 180°). . Угол изгиба θ определяется как угол между горизонтальным направлением и верхней плоскостью сложенного элемента, демонстрирующий синусоидальную зависимость относительно β.
С7). Из фазовой диаграммы на рис. 2 B , начиная с устойчивого состояния [00], стабильные состояния [10] и [11] могут быть непосредственно достигнуты при программировании напряженности магнитного поля B и направления α. Стабильное состояние [01] может быть достигнуто после стабильного состояния [11] ( SI Приложение , рис. S8). Двунаправленное искривление состояний [00], [10] и [01] под действием внеплоскостного магнитного поля под углом β к горизонтальному направлению показано на рис. 01], демонстрируя комплексные деформации изгиба и развертывания (видео S2).Обратите внимание, что развернутый блок не может сгибаться под действием приложенного магнитного поля. На рис. 2 D показаны экспериментальные измерения углов изгиба (состояния [00], [10] и [01]) в магнитном поле 30 мТл с различными направлениями (β в диапазоне от −180° до 180°). . Угол изгиба θ определяется как угол между горизонтальным направлением и верхней плоскостью сложенного элемента, демонстрирующий синусоидальную зависимость относительно β. Состояния [01] и [10] демонстрируют сходное поведение при изгибе с максимальным углом около 15°, так как только одна сложенная единица способствует общему изгибу, а состояние [00] демонстрирует больший изгиб с максимальным углом изгиба около 30°, так как изгиб накапливается из двух сложенных единиц.
Состояния [01] и [10] демонстрируют сходное поведение при изгибе с максимальным углом около 15°, так как только одна сложенная единица способствует общему изгибу, а состояние [00] демонстрирует больший изгиб с максимальным углом изгиба около 30°, так как изгиб накапливается из двух сложенных единиц.
Интегральное движение двухблочных магнитных сборок Креслинга. ( A ) Изменение состояния двухблочной сборки Креслинга с плоскостными намагниченностями Mi и магнитным полем в плоскости B . Двоичный код используется для представления состояния сборки, где первая и вторая цифры соответствуют нижней и верхней единицам соответственно. ( B ) Фазовая диаграмма, показывающая условия магнитного поля для переключения структуры из состояния [00] в состояния [10], [01] и [11].Точки взяты из экспериментальных измерений, подобранных полиномиальной функцией. ( C ) Двунаправленный изгиб двухзвенной сборки Креслинга с плоскостными намагниченностями Mi и внеплоскостным магнитным полем B . ( D ) Экспериментальные измерения двунаправленного угла изгиба. Точки взяты из экспериментальных измерений, подобранных синусоидальными функциями. ( E и F ) Всенаправленный изгиб двухкомпонентной сборки Креслинга с неплоскими намагниченностями Mo и магнитным полем в плоскости B ( E ) и полярная диаграмма экспериментального измерения угла изгиба ( Ф ).( G и I ) Мультимодальная деформация двухзвенной сборки Креслинга с плоскостным ( Верхняя пластина ) и внеплоскостным ( Нижняя пластина в плоскости Средняя ) намагничиванием и внутри плоское магнитное поле B , демонстрирующее всенаправленное изгибание в состоянии [00] ( G ) и всенаправленное изгибание в состоянии [01] ( I ). ( H и J ) Экспериментальные измерения полярной диаграммы угла изгиба в состоянии [00] ( H ) и полярной диаграммы в состоянии [01] ( J ).
( D ) Экспериментальные измерения двунаправленного угла изгиба. Точки взяты из экспериментальных измерений, подобранных синусоидальными функциями. ( E и F ) Всенаправленный изгиб двухкомпонентной сборки Креслинга с неплоскими намагниченностями Mo и магнитным полем в плоскости B ( E ) и полярная диаграмма экспериментального измерения угла изгиба ( Ф ).( G и I ) Мультимодальная деформация двухзвенной сборки Креслинга с плоскостным ( Верхняя пластина ) и внеплоскостным ( Нижняя пластина в плоскости Средняя ) намагничиванием и внутри плоское магнитное поле B , демонстрирующее всенаправленное изгибание в состоянии [00] ( G ) и всенаправленное изгибание в состоянии [01] ( I ). ( H и J ) Экспериментальные измерения полярной диаграммы угла изгиба в состоянии [00] ( H ) и полярной диаграммы в состоянии [01] ( J ). Серая область в J обозначает условия, когда верхний блок складывается.
Серая область в J обозначает условия, когда верхний блок складывается.
Вторая комбинация намагничивания двухзвенной сборки Креслинга имеет обе магнитные пластины, разработанные с неплоскими намагничиваниями Mo (рис. 2 E ) для всенаправленного изгиба. Под приложенным магнитным полем, которое распространяется в плоскости, наблюдается однородный изгиб во всех направлениях с максимальным углом изгиба 31°, как показано на полярной диаграмме на рис. 2 F . Угол изгиба можно увеличить, увеличив напряженность магнитного поля B или отрегулировав угол между Mo и B ( SI Приложение , рис.С9). Для интеграции всенаправленного изгиба с деформацией складывания/развертывания в сборке Креслинга из двух частей третья комбинация намагниченности показана на рис. верхний узел Креслинга, обладающий плоскостной намагниченностью Mi для складывания/раскладывания ( SI Приложение , рис. S10). Всенаправленные углы изгиба состояния [00] (рис. 2 G ) и состояния [01] (рис.2 I ) в плоскостных сметающих магнитных полях характеризуются на рис. 2 H и J соответственно. Получаются максимальные углы изгиба 37° (состояние [00]) и 28° (состояние [01]) в направлении 180°. В обоих случаях изгиб неоднороден из-за влияния Mi, которое можно компенсировать приложением переменного магнитного поля. Увеличение магнитного поля может привести к большим углам изгиба, но также может вызвать складывание верхнего блока в состоянии [01], обозначенном серой областью на рис.2 J .
2 G ) и состояния [01] (рис.2 I ) в плоскостных сметающих магнитных полях характеризуются на рис. 2 H и J соответственно. Получаются максимальные углы изгиба 37° (состояние [00]) и 28° (состояние [01]) в направлении 180°. В обоих случаях изгиб неоднороден из-за влияния Mi, которое можно компенсировать приложением переменного магнитного поля. Увеличение магнитного поля может привести к большим углам изгиба, но также может вызвать складывание верхнего блока в состоянии [01], обозначенном серой областью на рис.2 J .
Всенаправленное сгибание и развертывание четырехсекционного роботизированного манипулятора Kresling.
Основываясь на концепции интегрированного движения с комбинированным всенаправленным изгибом и развертыванием блоков Kresling, мы затем разрабатываем роботизированную руку Kresling, состоящую из четырех блоков Kresling, как показано на рис. 3 A , для достижения гораздо больших углов изгиба с возможность развертывания. Зеленый блок с фиксированным дном и намагничиванием вне плоскости обеспечивает возможность всенаправленного изгиба и называется гибочным блоком (фильм S3).Затем к осевому направлению манипулятора добавляются три элемента (желтый, синий и красный) с чередующимися направлениями складок, чтобы обеспечить возможность развертывания для «растяжения» манипулятора, и они рассматриваются как развертывающие элементы. Здесь желтый блок и красный блок могут быть развернуты с крутящим моментом по часовой стрелке, а синий блок может быть развернут с крутящим моментом против часовой стрелки. Блоки развертывания имеют направления намагниченности в плоскости для запуска выборочного развертывания в различных магнитных полях (фильм S3).Из-за аккумулированной деформации от нескольких блоков четырехсекционный робот-манипулятор демонстрирует большой всенаправленный изгиб и растяжение. На рис. 3 B показан пример профиля магнитного поля для изгиба и растяжения конструкции в направлении 0° (направление X ).
Зеленый блок с фиксированным дном и намагничиванием вне плоскости обеспечивает возможность всенаправленного изгиба и называется гибочным блоком (фильм S3).Затем к осевому направлению манипулятора добавляются три элемента (желтый, синий и красный) с чередующимися направлениями складок, чтобы обеспечить возможность развертывания для «растяжения» манипулятора, и они рассматриваются как развертывающие элементы. Здесь желтый блок и красный блок могут быть развернуты с крутящим моментом по часовой стрелке, а синий блок может быть развернут с крутящим моментом против часовой стрелки. Блоки развертывания имеют направления намагниченности в плоскости для запуска выборочного развертывания в различных магнитных полях (фильм S3).Из-за аккумулированной деформации от нескольких блоков четырехсекционный робот-манипулятор демонстрирует большой всенаправленный изгиб и растяжение. На рис. 3 B показан пример профиля магнитного поля для изгиба и растяжения конструкции в направлении 0° (направление X ). B — это векторное поле, которое можно разложить по трем декартовым направлениям (BX, BY и BZ). Магнитное поле силой 25 мТл в плоскости XY сначала прикладывается для изгиба руки в направлении 0°.Белый маркер в верхней части манипулятора показывает точно контролируемое направление изгиба до 0°. Затем прикладывается импульсное магнитное поле (40 мТл), параллельное верхней магнитной пластине, для быстрого развертывания красного модуля ( Приложение SI , Преобразование координат ). Чтобы сохранить направление изгиба после растяжения, прикладывается другое магнитное поле 25 мТл, которое отличается от магнитного поля изгиба, поскольку направление намагниченности пластины изменяется во время развертывания (рис.3 В ). Рис. 3 C характеризует угол изгиба в направлении 0° θ, определяемый как угол между деформированной верхней плоскостью и горизонтальным направлением в полностью сложенном состоянии манипулятора (только изгиб) и развернутом состоянии (изгиб с развертыванием).
B — это векторное поле, которое можно разложить по трем декартовым направлениям (BX, BY и BZ). Магнитное поле силой 25 мТл в плоскости XY сначала прикладывается для изгиба руки в направлении 0°.Белый маркер в верхней части манипулятора показывает точно контролируемое направление изгиба до 0°. Затем прикладывается импульсное магнитное поле (40 мТл), параллельное верхней магнитной пластине, для быстрого развертывания красного модуля ( Приложение SI , Преобразование координат ). Чтобы сохранить направление изгиба после растяжения, прикладывается другое магнитное поле 25 мТл, которое отличается от магнитного поля изгиба, поскольку направление намагниченности пластины изменяется во время развертывания (рис.3 В ). Рис. 3 C характеризует угол изгиба в направлении 0° θ, определяемый как угол между деформированной верхней плоскостью и горизонтальным направлением в полностью сложенном состоянии манипулятора (только изгиб) и развернутом состоянии (изгиб с развертыванием).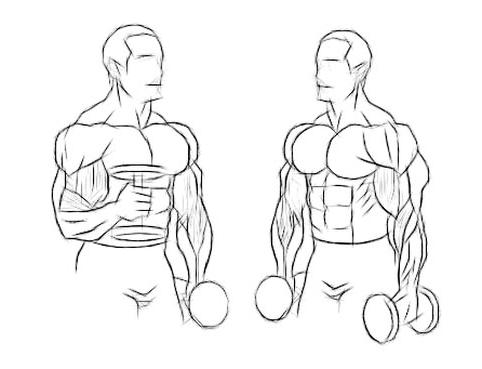 При увеличении напряженности магнитного поля манипулятор демонстрирует большие углы изгиба для обоих состояний с максимальными значениями 75° (только изгиб) и 52° (изгиб с развертыванием). Изгиб и растяжение манипулятора являются всенаправленными на основе рационально запрограммированных профилей магнитного поля (рис.3 D и фильм S4). С заданными направлениями складок и намагниченностью развертывающих блоков можно развертывать конкретный развертывающий блок (обозначенный цветной контурной рамкой), когда рука изгибается в разных направлениях (рис. 3 E ). Подробные профили магнитного поля для изгиба и растяжения манипуляторов в восьми различных направлениях показаны в SI, Приложение , рис. S11, а всенаправленные углы изгиба в полностью сложенном и развернутом состоянии характеризуются полярными графиками в SI. Приложение , рис.С12.
При увеличении напряженности магнитного поля манипулятор демонстрирует большие углы изгиба для обоих состояний с максимальными значениями 75° (только изгиб) и 52° (изгиб с развертыванием). Изгиб и растяжение манипулятора являются всенаправленными на основе рационально запрограммированных профилей магнитного поля (рис.3 D и фильм S4). С заданными направлениями складок и намагниченностью развертывающих блоков можно развертывать конкретный развертывающий блок (обозначенный цветной контурной рамкой), когда рука изгибается в разных направлениях (рис. 3 E ). Подробные профили магнитного поля для изгиба и растяжения манипуляторов в восьми различных направлениях показаны в SI, Приложение , рис. S11, а всенаправленные углы изгиба в полностью сложенном и развернутом состоянии характеризуются полярными графиками в SI. Приложение , рис.С12.
Всенаправленное изгибание и развертывание четырехсекционной роботизированной руки Kresling с относительно большими углами изгиба. ( A ) Схематическая конструкция и распределение намагниченности манипулятора из четырех частей. Три верхних блока используются для развертывания во всех направлениях, а нижний блок используется для всенаправленного изгиба. ( B ) Пример профиля магнитного поля (разложение трехмерного магнитного поля) манипулятора для изгиба в направлении 0° и последующего развертывания его верхнего красного блока. B , Врезки показывают результаты экспериментов с роботом-манипулятором из четырех частей в сложенном состоянии (только сгибание) и развернутом состоянии (сгибание с развертыванием). ( C ) Экспериментальная характеристика угла изгиба манипулятора в направлении 0° без развернутого блока и с развернутым красным блоком. ( D ) Результаты эксперимента: вид сверху на всенаправленное изгибание манипулятора робота с одним развернутым блоком. Цветные контурные прямоугольники представляют желтые, синие и красные подразделения, развернутые в восьми направлениях. Двоичный код используется для представления состояния всего манипулятора от нижнего до верхнего блока. ( E ) Экспериментальные результаты: вид спереди недеформированной руки и сгибание и растяжение в направлении 0° и 180°. (Шкала: 10 мм.)
Двоичный код используется для представления состояния всего манипулятора от нижнего до верхнего блока. ( E ) Экспериментальные результаты: вид спереди недеформированной руки и сгибание и растяжение в направлении 0° и 180°. (Шкала: 10 мм.)
Роботизированная рука, похожая на осьминога, для движений на растяжение, сгибание и скручивание.
Возможность конфигурирования рук осьминога на растяжение, сжатие, сгибание и скручивание позволяет выполнять многофункциональные движения, такие как ходьба, плавание и добыча (рис.4 А ). Вдохновленные этой биосистемой, мы разработали роботизированную руку Kresling из 12 единиц со всеми плоскостями намагничивания, как показано на рис. 4 B . Намагниченность магнитных пластин предназначена для того, чтобы быть в том же отрицательном направлении Z в полностью сложенном состоянии при сжатии ( SI Приложение , рис. S13). Из-за структурного сопротивления блоков Креслинга и сил отталкивания между магнитными пластинами каждый блок немного расширяется из плоского сложенного состояния, что приводит к распределенной намагниченности, как показано на виде сбоку на рис. 4 С . Одной из интересных особенностей рук осьминога является контролируемое растяжение и сгибание, что позволяет настраиваемой точке изгиба вытягиваться и взаимодействовать с добычей, как показано на рис. 4 D (41). Наша роботизированная рука, состоящая из 12 единиц, может обеспечить контролируемое развертывание с интегрированным изгибом, имитирующим движение руки осьминога. На рис. 4 E показаны обратимые растяжения и сокращения (видео S5). Во время растягивающего движения узлы могут быть развернуты последовательно слева направо под действием вращающегося против часовой стрелки магнитного поля, параллельного неподвижному концу (плоскость YZ ).Направление магнитного поля определяется относительным углом α к направлению Y в плоскости YZ . На рис. 4 F показано, что коэффициент растяжения Δ L / L имеет линейную зависимость от вращения магнитного поля с максимальным значением 66,7%, где L — начальная длина манипулятора робота.
4 С . Одной из интересных особенностей рук осьминога является контролируемое растяжение и сгибание, что позволяет настраиваемой точке изгиба вытягиваться и взаимодействовать с добычей, как показано на рис. 4 D (41). Наша роботизированная рука, состоящая из 12 единиц, может обеспечить контролируемое развертывание с интегрированным изгибом, имитирующим движение руки осьминога. На рис. 4 E показаны обратимые растяжения и сокращения (видео S5). Во время растягивающего движения узлы могут быть развернуты последовательно слева направо под действием вращающегося против часовой стрелки магнитного поля, параллельного неподвижному концу (плоскость YZ ).Направление магнитного поля определяется относительным углом α к направлению Y в плоскости YZ . На рис. 4 F показано, что коэффициент растяжения Δ L / L имеет линейную зависимость от вращения магнитного поля с максимальным значением 66,7%, где L — начальная длина манипулятора робота. Δ L — изменение длины. Роботизированная рука может вернуться в сложенное состояние под действием магнитного поля, вращающегося по часовой стрелке.Из-за неравномерно распределенной намагниченности в развернутом состоянии ( СИ Приложение , рис. S14) процесс сжатия узлов не является последовательным. Однако общая длина плеча может по-прежнему линейно уменьшаться по времени и по вращательному магнитному полю. Скорость его сокращения примерно такая же, как и скорость растяжения ( SI Приложение , рис. S15).
Δ L — изменение длины. Роботизированная рука может вернуться в сложенное состояние под действием магнитного поля, вращающегося по часовой стрелке.Из-за неравномерно распределенной намагниченности в развернутом состоянии ( СИ Приложение , рис. S14) процесс сжатия узлов не является последовательным. Однако общая длина плеча может по-прежнему линейно уменьшаться по времени и по вращательному магнитному полю. Скорость его сокращения примерно такая же, как и скорость растяжения ( SI Приложение , рис. S15).
Роботизированная рука, похожая на осьминога, с движениями растяжения, изгиба и скручивания. ( A ) Осьминог с настраиваемыми руками.( B ) Схематический дизайн 12-элементного робота-манипулятора для биомиметических движений. ( C ) Распределение намагниченности манипулятора. ( D ) Фотографии растяжения и сгибания рук осьминога во время добычи, адаптировано из исх. 41. ( E ) Экспериментальные результаты контролируемого растяжения и сжатия манипулятора под действием вращающихся магнитных полей. ( F ) Коэффициент растяжения Δ L / L относительно направления приложенного вращающегося магнитного поля α в плоскости YZ .( G ) Контролируемое поведение изгиба с различными развернутыми модулями. ( H ) Угол изгиба θ манипулятора относительно напряженности приложенного магнитного поля B с нулевым, четырьмя и восемью развернутыми узлами. ( I ) Нормированное отклонение d / L манипулятора относительно напряженности приложенного магнитного поля B с нулевым, четырьмя и восемью развернутыми узлами. ( J ) Вращающееся магнитное поле в плоскости XY , вращательное движение роботизированной руки, похожей на осьминога, и соответствующие две оси изгиба вдоль руки.( K ) Вращающееся магнитное поле в плоскости YZ , вращательное движение робота, похожего на руку осьминога, и соответствующие три оси изгиба вдоль руки. (Шкала: 20 мм.)
( F ) Коэффициент растяжения Δ L / L относительно направления приложенного вращающегося магнитного поля α в плоскости YZ .( G ) Контролируемое поведение изгиба с различными развернутыми модулями. ( H ) Угол изгиба θ манипулятора относительно напряженности приложенного магнитного поля B с нулевым, четырьмя и восемью развернутыми узлами. ( I ) Нормированное отклонение d / L манипулятора относительно напряженности приложенного магнитного поля B с нулевым, четырьмя и восемью развернутыми узлами. ( J ) Вращающееся магнитное поле в плоскости XY , вращательное движение роботизированной руки, похожей на осьминога, и соответствующие две оси изгиба вдоль руки.( K ) Вращающееся магнитное поле в плоскости YZ , вращательное движение робота, похожего на руку осьминога, и соответствующие три оси изгиба вдоль руки. (Шкала: 20 мм.)
Манипулятор также может вызывать деформацию изгиба под действием другого магнитного поля, как показано на рис.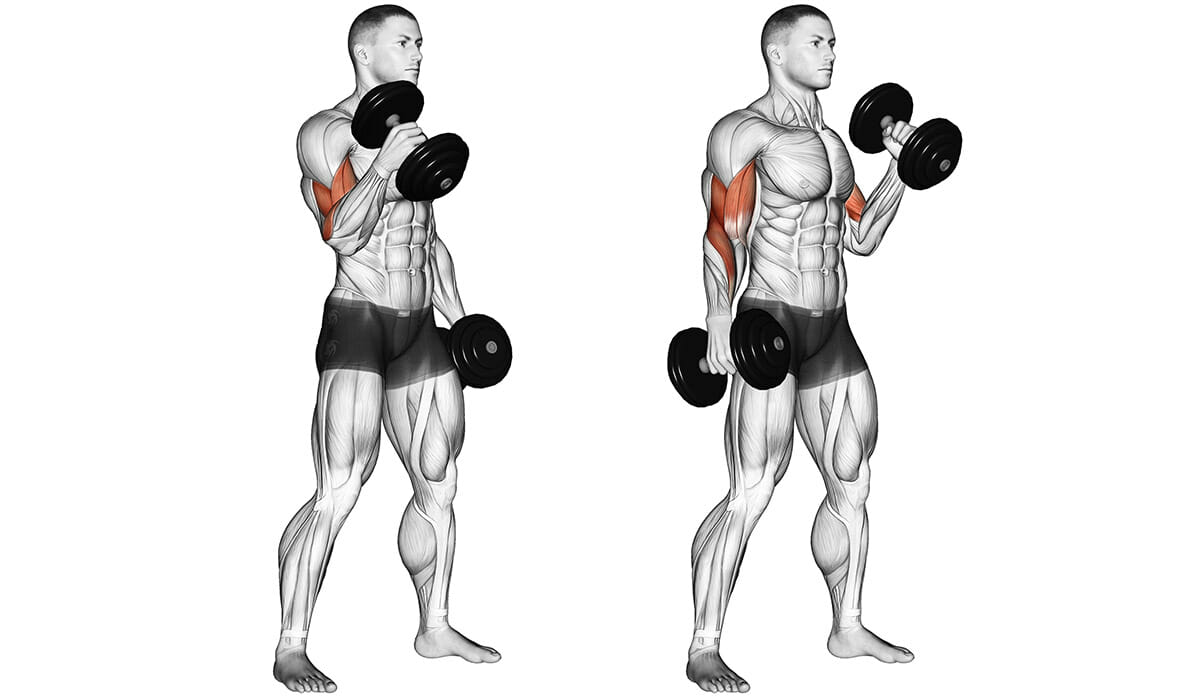 4 G . Поведение робота-манипулятора при изгибе можно легко совместить с выбранным количеством развернутых единиц (ноль единиц, четыре единицы и восемь единиц на рис. 4 G и видео S5), что напоминает поведение изгиба и растяжения осьминога. рука (рис.4 Д ). Таким образом можно регулировать общую длину и жесткость согнутой руки. Рис. 4 H и I характеризуют угол изгиба θ и нормированный прогиб ( d / L ) управляемого изгиба с растяжением. Угол изгиба θ определяется как угол между нейтральной осью на свободном конце и горизонтальным направлением, а отклонение d определяется как расстояние по вертикали между двумя концами рычага. Как показано на рис.4 H , с увеличением магнитного поля до B = 40 мТл, θ увеличивается и затем достигает 72°, 76° и 86° для трех случаев с восемью, четырьмя и нулевым развернутым блоком соответственно. Точно так же количество развернутых блоков заметно влияет на нормализованное отклонение манипулятора с максимальным значением 39,8%, 57,1% и 79,4% для трех случаев с восемью, четырьмя и нулевыми развернутыми блоками, как показано на рис.
4 G . Поведение робота-манипулятора при изгибе можно легко совместить с выбранным количеством развернутых единиц (ноль единиц, четыре единицы и восемь единиц на рис. 4 G и видео S5), что напоминает поведение изгиба и растяжения осьминога. рука (рис.4 Д ). Таким образом можно регулировать общую длину и жесткость согнутой руки. Рис. 4 H и I характеризуют угол изгиба θ и нормированный прогиб ( d / L ) управляемого изгиба с растяжением. Угол изгиба θ определяется как угол между нейтральной осью на свободном конце и горизонтальным направлением, а отклонение d определяется как расстояние по вертикали между двумя концами рычага. Как показано на рис.4 H , с увеличением магнитного поля до B = 40 мТл, θ увеличивается и затем достигает 72°, 76° и 86° для трех случаев с восемью, четырьмя и нулевым развернутым блоком соответственно. Точно так же количество развернутых блоков заметно влияет на нормализованное отклонение манипулятора с максимальным значением 39,8%, 57,1% и 79,4% для трех случаев с восемью, четырьмя и нулевыми развернутыми блоками, как показано на рис. 4 I .
4 I .
Что еще более интересно, 3D реконфигурация внеплоскостной формы манипулятора робота может быть достигнута за счет интегрированного движения изгиба и скручивания под действием запрограммированных магнитных полей.При приложении вращающегося против часовой стрелки магнитного поля в плоскости XY , начиная с отрицательного направления X , рука сначала изгибается в плоскости XY , а затем выкручивается из плоскости при взаимодействии с землей (рис. 4 J ). и фильм S5). Этот изгиб-скручивание примерно разделен на два сегмента с двумя разными осями изгиба, обозначенными синим и желтым цветом на трехмерной схеме на рис. 4 J . При изменении магнитного поля на вращающееся по часовой стрелке магнитное поле в плоскости YZ , начиная с отрицательного направления Y , рычаг сначала слегка сжимается, а затем выгибается из плоскости XY с тремя осями изгиба, как показано на рис. .4 K , что приводит к другой деформации изгиба-скручивания с тремя сегментами (синий, желтый и зеленый на трехмерной схеме). Морфологию закручивания можно определить по зависящему от времени полю B .
Морфологию закручивания можно определить по зависящему от времени полю B .
Роботы-манипуляторы Kresling продемонстрировали способность осуществлять мультимодальную деформацию под хорошо регулируемым магнитным управлением. Спроектировав распределение намагниченности многокомпонентного роботизированного манипулятора, можно добиться более интересных, высокоинтегрированных движений.На рис. 5 показана манипуляторная рука, похожая на руку осьминога, состоящая из 18 элементов, которая может вызывать всенаправленное изгибание для взаимодействия с объектами. 18 намагниченностей вне плоскости рассчитаны с переменным направлением для каждых шести единиц, как показано на рис. 5 A . Осьминог машет руками, принимая различные изогнутые формы, чтобы обходить препятствия, протягивать руку и добывать добычу (рис. 5 B и C ). Чтобы имитировать волнообразное движение робота-манипулятора на рис. 5 B , сначала применяется магнитное поле мощностью 35 мТл вдоль направления Y (1 с), и рука принимает изогнутую форму в направлении XY . плоскость (рис.5 D ). Следуя за вращением магнитного поля в плоскости YZ , рычаг из 18 единиц реализует динамическое всенаправленное изгибание (фильм S6). Конфигурация изогнутой руки осьминога на рис. 5 C может быть реализована и дополнительно исследована для таких функций, как захват и подъем предметов. Как показано на рис. 5 E , вращающееся магнитное поле в плоскости XY применяется для сгибания кончика руки и захвата объекта за 4 с. Затем приложенное магнитное поле программируется на вращение вокруг оси X , чтобы поднять объект еще на 4 секунды (видео S6).
плоскость (рис.5 D ). Следуя за вращением магнитного поля в плоскости YZ , рычаг из 18 единиц реализует динамическое всенаправленное изгибание (фильм S6). Конфигурация изогнутой руки осьминога на рис. 5 C может быть реализована и дополнительно исследована для таких функций, как захват и подъем предметов. Как показано на рис. 5 E , вращающееся магнитное поле в плоскости XY применяется для сгибания кончика руки и захвата объекта за 4 с. Затем приложенное магнитное поле программируется на вращение вокруг оси X , чтобы поднять объект еще на 4 секунды (видео S6).
Роботизированная рука, похожая на осьминога, с всенаправленным изгибом и функциональностью, иллюстрируемой захватом объекта. ( A ) Схематическая конструкция и распределение намагниченности вне плоскости 18-элементной роботизированной руки для биомиметических движений. ( B и C ) Осьминог машет руками, принимая различные изогнутые формы; адаптировано из исх.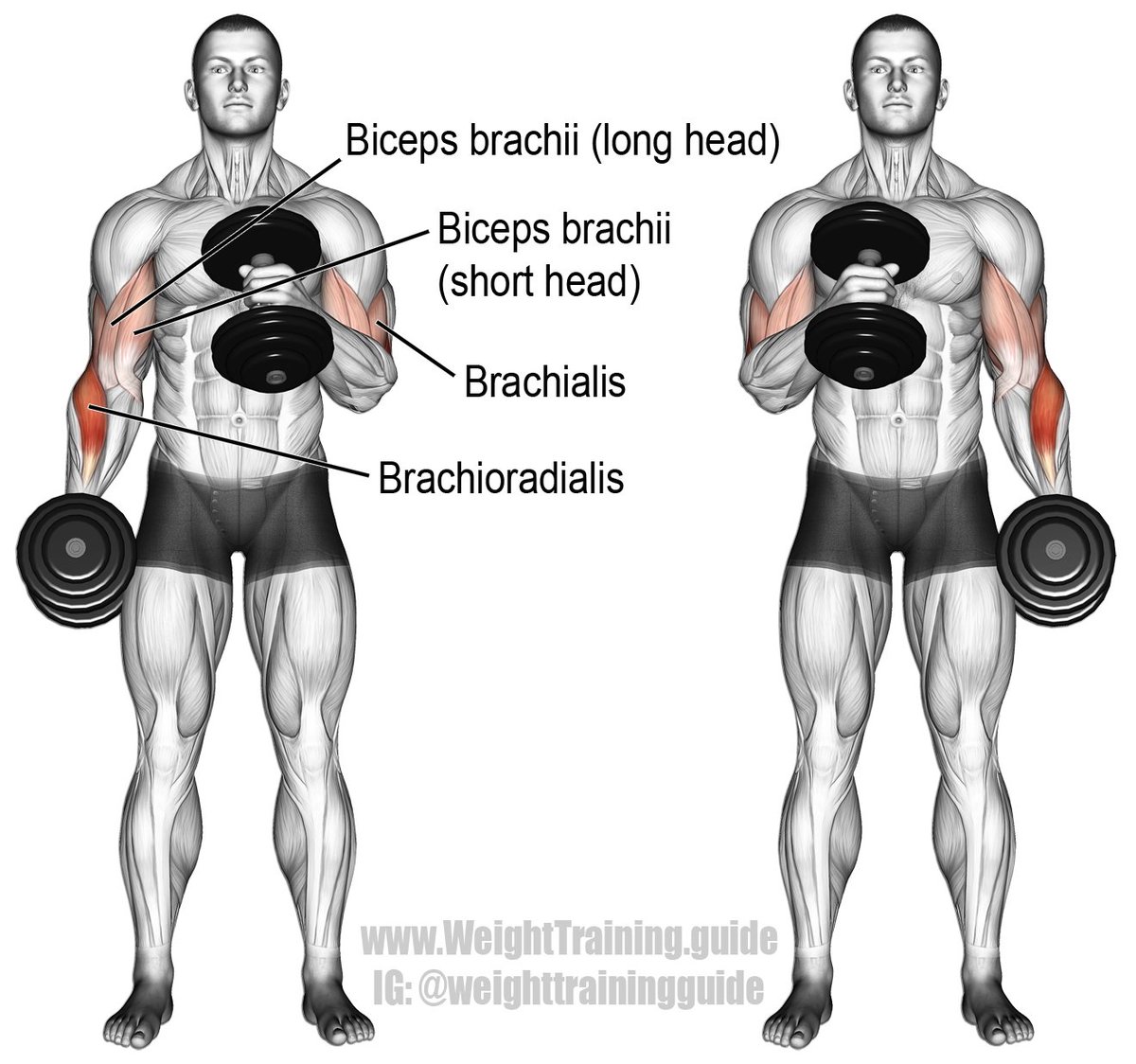 42. ( D ) Магнитный профиль и экспериментальные результаты всенаправленного изгибающего движения манипулятора при виде сверху и спереди.( E ) Магнитный профиль и результаты экспериментов по захвату и подъему объекта роботом-манипулятором при виде сверху и спереди. (Шкала: 20 мм.)
42. ( D ) Магнитный профиль и экспериментальные результаты всенаправленного изгибающего движения манипулятора при виде сверху и спереди.( E ) Магнитный профиль и результаты экспериментов по захвату и подъему объекта роботом-манипулятором при виде сверху и спереди. (Шкала: 20 мм.)
Заключительные замечания
Мы разработали многофункциональные роботы-манипуляторы-оригами для биомиметических многомодальных деформаций и движений с неконтролируемой активацией с использованием магнитных полей. С помощью синергетически разработанных узлов оригами Kresling и магнитных элементов управления демонстрируются несколько конструкций роботов-манипуляторов с интегрированными деформациями складывания, растяжения, всенаправленного изгиба и скручивания.С контролем маневренных движений робота-манипулятора становятся возможными функциональные операции, включая захват объектов и манипулирование ими. Магнитное срабатывание обеспечивает сверхбыстрое управление манипулятором без привязки и в то же время делает возможным использование небольших устройств ( SI Приложение , рис. S16). Всенаправленные изгибы и интегрированные движения продемонстрированных небольших роботов-манипуляторов ( SI Приложение , рис. S17 и S18 и фильм S7) можно использовать для разработки миниатюрных медицинских устройств для эндоскопии, интубации и катетеризации с функциями манипулирования объектами и движение в трехмерном пространстве.Интегрированные движения робота-манипулятора Kresling вместе с непривязанным и распределенным магнитным срабатыванием обеспечивают инновационную стратегию для функциональных операций, таких как навигация, обнаружение и взаимодействие с объектами в средах с ограниченным доступом.
S16). Всенаправленные изгибы и интегрированные движения продемонстрированных небольших роботов-манипуляторов ( SI Приложение , рис. S17 и S18 и фильм S7) можно использовать для разработки миниатюрных медицинских устройств для эндоскопии, интубации и катетеризации с функциями манипулирования объектами и движение в трехмерном пространстве.Интегрированные движения робота-манипулятора Kresling вместе с непривязанным и распределенным магнитным срабатыванием обеспечивают инновационную стратегию для функциональных операций, таких как навигация, обнаружение и взаимодействие с объектами в средах с ограниченным доступом.
Материалы и методы
Блоки Креслинга изготавливаются по специально разработанным шаблонам Креслинга ( SI Приложение , рис. S1) с использованием бумаги для оригами Tant (толщиной 0,14 мм) или полипропиленовой пленки (толщиной 0,08 мм). Жесткие шестигранники крепятся к верхней и нижней поверхностям устройства с помощью бумаги Canson Mi-Teintes (0. толщиной 2 мм) или майлар (0,13 мм). К блоку Креслинга крепится магнитная пластина с заданной намагниченностью. Несколько блоков с определенной геометрией, материалами и намагничиванием собираются в различные конструкции манипулятора в зависимости от области применения. Более подробная информация представлена в SI Приложение .
толщиной 2 мм) или майлар (0,13 мм). К блоку Креслинга крепится магнитная пластина с заданной намагниченностью. Несколько блоков с определенной геометрией, материалами и намагничиванием собираются в различные конструкции манипулятора в зависимости от области применения. Более подробная информация представлена в SI Приложение .
Доступность данных
Все данные исследования включены в статью и/или вспомогательную информацию.
Благодарности
Р.З., С.В., К.З. и Д.Д. получили поддержку NSF Career Award CMMI-1943070 и NSF Award CMMI-1939543.Г.Х.П. и Н.У. признать награду NSF CMMI-1538830 и пожертвование, предоставленное председателем Рэймонда Аллена Джонса в Технологическом институте Джорджии. Мы благодарим г-жу Юэ Сун за ее щедрую помощь в фабрикации Креслинга и г-на Туо Чжао за проницательные обсуждения, которые улучшили рукопись.
Сноски
Вклад авторов: G.H.P. и Р.З. проектное исследование; SW, QZ и JD провели исследование; SW, QZ и JD проанализировали данные; и С.
В., К.З., Дж.Д., Н.У., Г.Х.П. и Р.З. написал бумагу.Авторы заявляют об отсутствии конкурирующих интересов.
Эта статья является прямой отправкой PNAS.
Эта статья содержит вспомогательную информацию в Интернете по адресу https://www.pnas.org/lookup/suppl/doi:10.1073/pnas.2110023118/-/DCSupplemental.
 В., К.З., Дж.Д., Н.У., Г.Х.П. и Р.З. написал бумагу.
В., К.З., Дж.Д., Н.У., Г.Х.П. и Р.З. написал бумагу.- Copyright © 2021 Автор(ы). Опубликовано ПНАС.
определение сгибания рук | Английский словарь для учащихся
изгиба
(
глины множественное число и 3-я человек 4 ) ( Гибка Настоящее причастие ) ( Bent Прошедшее время и прошлое причастие )
1 глагол Когда вы наклоняетесь, вы перемещаете верхнюю часть тела вниз и вперед.Растения и деревья также гнутся.
Я наклонился и поцеловал ее в щеку… V adv/prep
Она наклонилась и взяла пластиковое ведро… V
Она склонилась над раковиной, мыла посуду. V-образный
V-образный
2 глагол Когда вы наклоняете голову, вы двигаете ее вперед и вниз.
Появился Рик, немного наклонив голову, чтобы пройти через верхнюю часть двери. В п
3 глагол Когда вы сгибаете часть своего тела, например руку или ногу, или когда она сгибается, вы меняете ее положение так, что она больше не является прямой.
Эти жестокие приспособления предназначены для того, чтобы заключенные не сгибали ноги… V n
Чем быстрее вы идете, тем быстрее и естественнее сгибаются руки. В
♦ согнуты прил
Держите колени слегка согнутыми.
4 глагол Если вы сгибаете что-то плоское или прямое, вы применяете силу, чтобы сделать это изогнутым или придать ему угол., (Антоним: выпрямить)
Согните стержень в виде подковы… Подготовка к п.
Она прорезала неровное отверстие в жестяной банке, согнув при этом нож. Вн, также Вн с нареч.
Вн, также Вн с нареч.
♦ изогнутый прил
…отрезок изогнутой проволоки.
5 глагол Когда дорога, луч света или другая длинная тонкая вещь изгибается, или когда что-то изгибает ее, она меняет направление, образуя кривую или угол.
Дорога слегка изгибается вправо… V
Стекло преломляет свет разных цветов в разной степени. В п
6 n-count Изгиб дороги, трубы или другого длинного тонкого объекта представляет собой изгиб или угол в нем.
Авария произошла на крутом повороте.
7 глагол Если кто-то подчиняется вашим желаниям, он верит или делает что-то другое, обычно когда он этого не хочет.
Конгресс должен подчиниться его воле… V to n
Как вы думаете, может ли она изменить свое отношение к Европе? В
8 глагол Если вы нарушаете правила или законы, вы интерпретируете их таким образом, что позволяете делать то, что они обычно не позволяют вам делать.
Меньшая часть офицеров была готова нарушить правила. В п
9 глагол Если вы искажаете правду или искажаете факты, вы говорите что-то не совсем верное.
Иногда мы немного искажаем правду, чтобы избавить их от боли реальных фактов. В п
10
→
изогнутый
→
изгиб шпильки
11 Если вы говорите, что кто-то из кожи вон лезет, чтобы быть полезным или добрым, вы подчеркиваете, что он очень старается быть полезным или добрым.
♦ прогнуться назад фраза V склоняет, usu PHR to-inf (ударение)
Люди из кожи вон лезут, чтобы угодить клиентам.
(БРИТ)
НЕФОРМАЛЬНЫЙ
♦ загнать сб за поворот фраза В склонить (чувства) И не мог бы ты заварить этот чай до того, как твое ерзание сведет меня с ума.

шпилька изгиб ( шпилька изгиб множественное число ) Шпилька изгиб или шпилька – это очень крутой поворот на дороге, где дорога поворачивает назад в противоположном направлении. n-количество
Сгибая руки, пока танцуешь ирландский танец?
Вы танцор, который сгибает руки, когда танцует? Ваши локти выскакивают во время прыжков и вращений, а ваш учитель танцев постоянно кричит вам «РУКИ ПРЯМО». Если это про вас, возможно, нужно укрепить важную мышцу на руках — трицепс!
Ваш трицепс — это мышца на задней части верхней части руки. Их основная обязанность — выпрямить вашу руку, разогнув локтевой сустав.Для ирландских танцоров эта мышца имеет решающее значение для исполнения идеальной позы в ирландском танце. Одно из наших любимых упражнений Target Training для укрепления трицепсов — отжимания на трицепс. Он нацелен не только на трицепсы, но и на мышцы кора и груди!
Добавьте это в свою еженедельную тренировочную программу и следите за тем, сколько вы можете сделать в идеальной форме! По мере того, как вы становитесь сильнее, вы увидите, как улучшается ваша форма и увеличивается количество повторений.
Удачной тренировки!
ОТЖИМ НА ТРИЦЕПС — Начните с положения планки (на носках или коленях), положив руки прямо под плечи.
— Напрягите мышцы кора, втянув пупок вверх и внутрь (ни одна попа не торчит в воздухе и не прогибается в спине).
— Когда вы опускаетесь на землю, направляйте локти прямо назад (вместо того, чтобы расставлять их в стороны при «обычном» отжимании). Ваши руки должны касаться ваших боков.
— Опускайтесь до упора, пока грудь не коснется пола, затем оттолкнитесь, сохраняя прямую линию от головы до пят (или коленей).
ИНТЕРЕСУЕТСЯ ДОПОЛНИТЕЛЬНЫМИ ПОЗИЦИЯМИ ДЛЯ ИРЛАНДСКОГО ТАНЦА?
Примите участие в 30-дневном испытании осанки в онлайн-институте Target Training!
Получите 1 МЕСЯЦ БЕСПЛАТНО в онлайн-институте Target Training
Сила и кондиционирование ирландского танца, В ЛЮБОЕ ВРЕМЯ, В ЛЮБОМ МЕСТЕ! Присоединяйтесь к онлайн-институту Target Training сегодня и получите первый месяц бесплатно с подпиской «Тренер» с кодом 1MONTHFREE.
Начните с Institute.targettrainingdance.com
#Трицепс #поза
Фиксация согнутых рук на спине Пружины… Имеет ли значение?
«Помогите! Я не могу зафиксировать руки в обратном прыжке и не знаю, что не так. У вас есть какие-нибудь упражнения или исправления для меня?» – Разочарованная чирлидерша
Если бы я получал десять центов каждый раз, когда слышу просьбу о помощи из , я был бы самым богатым тренером по акробатике!
Как оказалось, есть очень веская причина, по которой мне присылают кучу электронных писем о согнутых руках в прыжке назад — они никому не нравятся! Стало приемлемым фактом, что вы должны блокировать руки во время этого навыка, несмотря ни на что.
… Но всегда ли это так?
Что ж, ответ не такой черно-белый, как вам может показаться. Чтобы объяснить это лучше, я собрался с моими друзьями из Perfect A Flip , и мы обсудили не только КАК исправить согнутые руки во время прыжка, но и когда небольшой наклон на самом деле является нормальным и безопасным!
Так что нажимайте кнопку воспроизведения выше и настраивайтесь!
Ресурсы по эпизодам и важные моменты для запоминания
- Думайте о руках как о амортизаторах во время BHS. Это означает, что ДОЛЖНЫ быть некоторые дать
- Все люди устроены по-разному, поэтому не просите того, кто не может нормально выпрямить локти, выпрямить их во время BHS
- Спортсменов с естественной гиперэкстензией никогда не следует просить «зафиксировать» руки во время BHS
- Как можно использовать согнутые руки в BHS в качестве жизнеспособного метода «обмана» для разработки очень мощного блока конечных навыков
 Это означает, что ДОЛЖНЫ быть некоторые дать
Это означает, что ДОЛЖНЫ быть некоторые датьУпражнения, о которых Юрий упоминал в Эпизоде
Флориан Ландуит PERFECT RO BHS
Если этот выпуск был вам полезен, не забудьте ПОДЕЛИТЬСЯ им с друзьями, спортсменами и тренерами!
Почему мы ходим с прямыми руками, а бежим с согнутыми?
Все мы знаем, как странно видеть, как кто-то бежит с прямыми руками, но вместо того, чтобы просто считать это странным, исследователь из США изучил, почему мы склонны ходить с прямыми руками, а бегать с согнутыми, и это может что-то связанное с энергосбережением. Он говорит, что на ходьбу с согнутыми руками мы потратим дополнительно 11 % запаса энергии. Как ни странно, бег как с прямыми, так и с согнутыми руками требует одинаковой энергии, говорит он. Исследователь заканчивает тем, что говорит, что сгибание рук во время бега не дает никакой энергетической выгоды, и должна быть другая причина, по которой мы держим руки поднятыми.
Он говорит, что на ходьбу с согнутыми руками мы потратим дополнительно 11 % запаса энергии. Как ни странно, бег как с прямыми, так и с согнутыми руками требует одинаковой энергии, говорит он. Исследователь заканчивает тем, что говорит, что сгибание рук во время бега не дает никакой энергетической выгоды, и должна быть другая причина, по которой мы держим руки поднятыми.
Журнал/конференция: Journal of Experimental Biology
Ссылка на исследование (DOI): 10.1242/jeb.197228
Организация/и: Гарвардский университет, США
Пресс-релиз
От: Компания Биологов Однажды в 2015 году, бродя по кампусу Гарварда, аспирант Эндрю Йегиан вспоминает, как нечто необычное привлекло его внимание.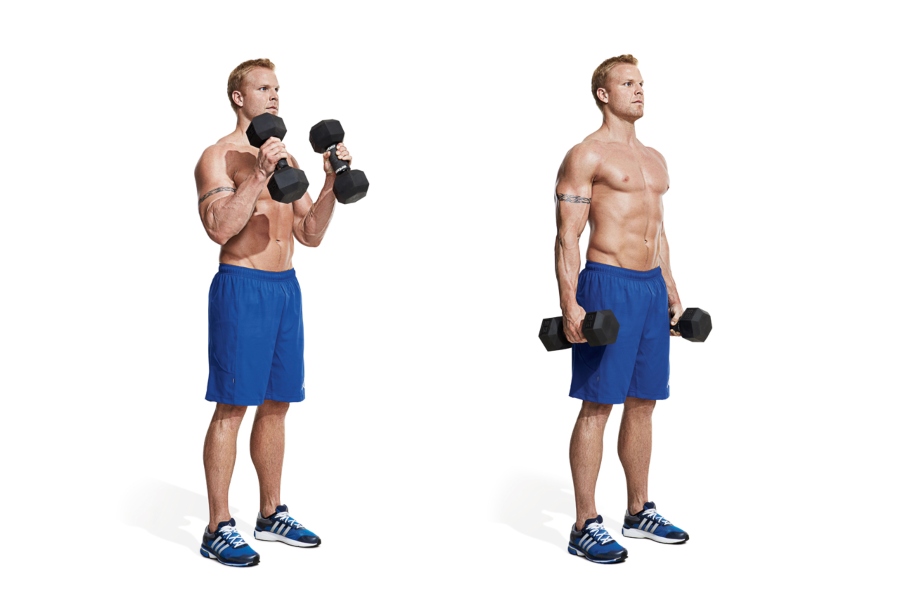 «Я заметил человека, бегущего с прямыми руками», — объясняет он. Это действительно выделялось для Егиана, так как бегуны обычно сгибают локти, в то время как ходоки держат руки прямо, что заставило его задаться вопросом: «Если прямые руки лучше подходят для ходьбы, то почему они не подходят для бега, и наоборот?» — недоумевал он. . Был ли компромисс между затратами на сгибание локтя и размахиванием рукой у плеча, который мог бы принести пользу бегунам? Могут ли ходоки экономить энергию, держа руки прямо? Заинтригованный, Йегиан и его научный руководитель Дэн Либерман решили снимать спортсменов, идущих и бегущих с прямыми и согнутыми руками, чтобы выяснить, почему бегуны держат руки согнутыми, в то время как ходоки позволяют им раскачиваться.
«Я заметил человека, бегущего с прямыми руками», — объясняет он. Это действительно выделялось для Егиана, так как бегуны обычно сгибают локти, в то время как ходоки держат руки прямо, что заставило его задаться вопросом: «Если прямые руки лучше подходят для ходьбы, то почему они не подходят для бега, и наоборот?» — недоумевал он. . Был ли компромисс между затратами на сгибание локтя и размахиванием рукой у плеча, который мог бы принести пользу бегунам? Могут ли ходоки экономить энергию, держа руки прямо? Заинтригованный, Йегиан и его научный руководитель Дэн Либерман решили снимать спортсменов, идущих и бегущих с прямыми и согнутыми руками, чтобы выяснить, почему бегуны держат руки согнутыми, в то время как ходоки позволяют им раскачиваться.
Выбрав восемь студентов и аспирантов — от бегунов, которые занимаются спортом два раза в неделю, до серьезных участников марафона — для ходьбы и бега на беговой дорожке, Егиан говорит: «Мы хотели изучить такой вариант, потому что бег на согнутых руках кажется почти универсальное поведение, независимо от того, сколько человек бегает». Вместе со студентами Янишем Такером и Стивеном Гиллиновым Егиан разместил светоотражающие маркеры на плечах, локтях и запястьях спортсменов, прежде чем попросить бегунов пройти со скоростью ∼1.4 м с-1 и бежали со скоростью ~ 3 м с-1 с прямыми и согнутыми руками, пока они снимали движения добровольцев в 3D. «Сложнее всего было бежать с прямыми руками», — вспоминает Егян, добавляя, что всем спортсменам это движение показалось странным. Затем Егиан и его коллеги-студенты пригласили добровольцев вернуться через 2 недели, чтобы они могли повторить испытания по бегу и ходьбе, но на этот раз спортсмены дышали через маску, чтобы измерить потребление кислорода, что позволило ученым рассчитать энергию спортсменов. потребление, когда они двигались с руками в разных положениях.
Вместе со студентами Янишем Такером и Стивеном Гиллиновым Егиан разместил светоотражающие маркеры на плечах, локтях и запястьях спортсменов, прежде чем попросить бегунов пройти со скоростью ∼1.4 м с-1 и бежали со скоростью ~ 3 м с-1 с прямыми и согнутыми руками, пока они снимали движения добровольцев в 3D. «Сложнее всего было бежать с прямыми руками», — вспоминает Егян, добавляя, что всем спортсменам это движение показалось странным. Затем Егиан и его коллеги-студенты пригласили добровольцев вернуться через 2 недели, чтобы они могли повторить испытания по бегу и ходьбе, но на этот раз спортсмены дышали через маску, чтобы измерить потребление кислорода, что позволило ученым рассчитать энергию спортсменов. потребление, когда они двигались с руками в разных положениях.
Сравнивая затраты энергии, команда была впечатлена тем, что сгибание рук во время ходьбы увеличивает стоимость ходунков на 11%. И когда они подсчитали количество усилий, необходимых для того, чтобы держать руку согнутой, стало ясно, что сгибание локтя требует затрат, хотя это было немного компенсировано меньшими затратами на размахивание относительно короткой рукой. Таким образом, ходьба с прямыми руками, безусловно, является наиболее эффективным вариантом.
Таким образом, ходьба с прямыми руками, безусловно, является наиболее эффективным вариантом.
Однако, когда команда сравнила энергозатраты бегунов, результат оказался менее ясным.«Мы не нашли никаких доказательств того, что затраты энергии были разными в зависимости от положения рук во время бега, — говорит Егиан, который подозревал, что бег с согнутыми руками будет более эффективным, — поскольку так делают почти все», — говорит он.
Таким образом, до сих пор не выяснено, почему бегуны сгибают руки, хотя Егиан подозревает, что должно быть какое-то преимущество, не имеющее отношения к энергетическим затратам, которое заставляет бегунов качать руки, когда они бьют по улицам.
.