
Каковы различия между мышцами-антагонистами и агонистами?
Разница между мышцами-антагонистами и агонистами заключается в том, что они работают в противоположном направлении, чтобы завершить действие. Мышцы-агонисты реагируют на добровольные или непроизвольные стимулы и создают движение, необходимое для выполнения задачи. Мышцы-антагонисты действуют на мышцы-агонисты и помогают вернуть часть тела на место после завершения действия.
Шестьсот мышц составляют костно-мышечную систему человека. Сухожилия прикрепляют мышцы к костям, позволяют мышцам двигать кости и придают суставам гибкость. Мышцы-антагонисты и агонисты работают парами, чтобы выполнять полный спектр движений и действий. Мышцы, однако, не являются конкретно антагонистами или агонистами.
В зависимости от требуемого движения мышца может быть агонистом в одном движении и антагонистом в другом действии. Агонист всегда заключает контракт, чтобы начать движение, и антагонист растягивается и удлиняется, чтобы позволить движение.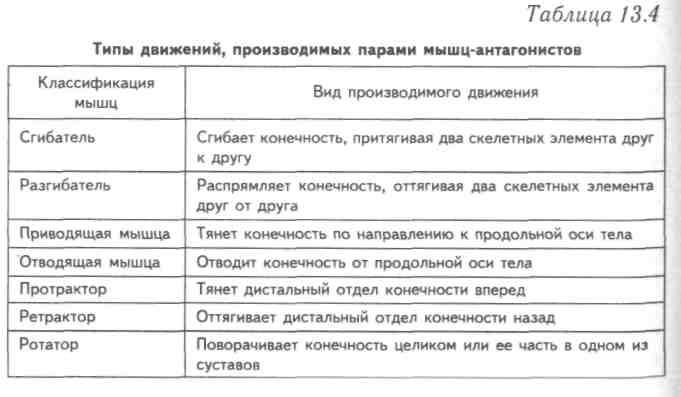
Существуют общие пары мышц-антагонистов и агонистов. В верхней части тела бицепс и трицепс работают для выполнения действий, связанных с движением руки. Четырехглавые мышцы и подколенные сухожилия в верхней части ноги помогают двигать коленным суставом и выполнять упражнения, такие как приседания и разгибания ног. Другие примеры включают грудные и широчайшие мышцы спины в области груди и спины, а также трапециевидные и дельтовидные мышцы верхней части спины и плеч.
Агонистов часто называют первопроходцем. Они инициируют сокращение, необходимое для перемещения конечности через диапазон движения сустава. Примерами агонистов в действии являются бицепсы во время сгибания бицепса и четырехглавые мышцы во время подъема ноги.
Антагонисты обычно реакционные. Это означает, что они удлиняются или растягиваются, чтобы агонист мог завершить действие. В случае сокращения бицепсовой мышцы для скручивания бицепса трицепс считается мышцей-антагонистом. Подколенное сухожилие становится антагонистом, когда четырехглавая мышца сокращается, чтобы сделать подтяжку ног.
В случае сокращения бицепсовой мышцы для скручивания бицепса трицепс считается мышцей-антагонистом. Подколенное сухожилие становится антагонистом, когда четырехглавая мышца сокращается, чтобы сделать подтяжку ног.
Другие типы мышц помогают мышцам-антагонистам и агонистам выполнять необходимые движения. Мышцы синергиста часто помогают агонисту совершать начальные движения в суставе. Другой тип мышц, фиксатор, помогает стабилизировать окружающие структуры во время движения мышц-антагонистов и агонистов.
ДРУГИЕ ЯЗЫКИ
Комментирую полученные комментарии про упражнения: healthy_back — LiveJournal
All rights reserved
http://mirslovarei.com/content_med/Agonist-Agonist-44.html
Агонист (agonist)
Prime mover — мышца, за счет сокращения которой происходит определенное движение той или иной части тела. Сокращение мышцы-агониста сопровождается расслаблением противодействующей ей мышцы-антагониста.http://mirslovarei.com/content_med/Antagonist-Antagonist-361.html
Антагонист (antagonist)
1. Мышца, действующая противоположно (противодействующая) другой мышце (называемой агонистом (agonist) или (prime mover)). Работа мышц-агонистов и антагонистов позволяет человеку нормально двигаться.
Причина гиперлордоза — напряжение пояснично-подвздошной мышцы (ППМ) или слабые мышцы брюшного пресса. Укрепив и тонизировав антагонист ППМ (пресс), мы расслабим агонист (саму ППМ).
Факты — вещь упрямая. Такая ситуация действительно существует. См. картинку. Пояснично-подвздошные мышцы (ППМ) и мышцы пресса — антагонисты, то есть, что при напряжении одних расслабляются другие. Соответственно, да, для расслабления ППМ нужно укреплять пресс. Прошу обратить внимание, что речь идёт о симметричном нарушении работы мышц, а НЕ о сколиозе.
Картинка: http://www.skoliozu.net/pacients.phtml, обсуждение картинки было: http://healthy-back.livejournal.com/95378. html#blum
html#blum
Картинки: http://www.eorthopod.com/public/patient_education/10172/adult_degenerative_scoliosis.html
http://foto.radikal.ru/f.aspx?j06121c4e8b18b496jpg
http://foto.radikal.ru/f.aspx?j061274c26b44a6c5jpg
http://www.scoliosissos.com/results.html
Попытки асимметрчного укрепления пояснично-подвздошной мышцы известны, называются «тренировка ППМ по Кону», эффективность их близка к нулю — есть единичные случаи того, что кому-то «помогло», систематического эффекта нет.
Когда мышца (первая) напряжена, напрягается и антагонист (вторая мышца), препятствуя её полному и резкому сокращению. Расслабим агонист (первую мышцу), снизит тонус и антагонист (вторая мышца).
Такой принцип расслабления мышцы действительно существует. Именно его используют в клиниках Шрот, что бы они ни говорили по поводу «коррекции неправильного дыхания».
Предложенная схема действий будет работать при двух условиях:
1) Вы можете правильно определить напряжение какой мышцы первично, т.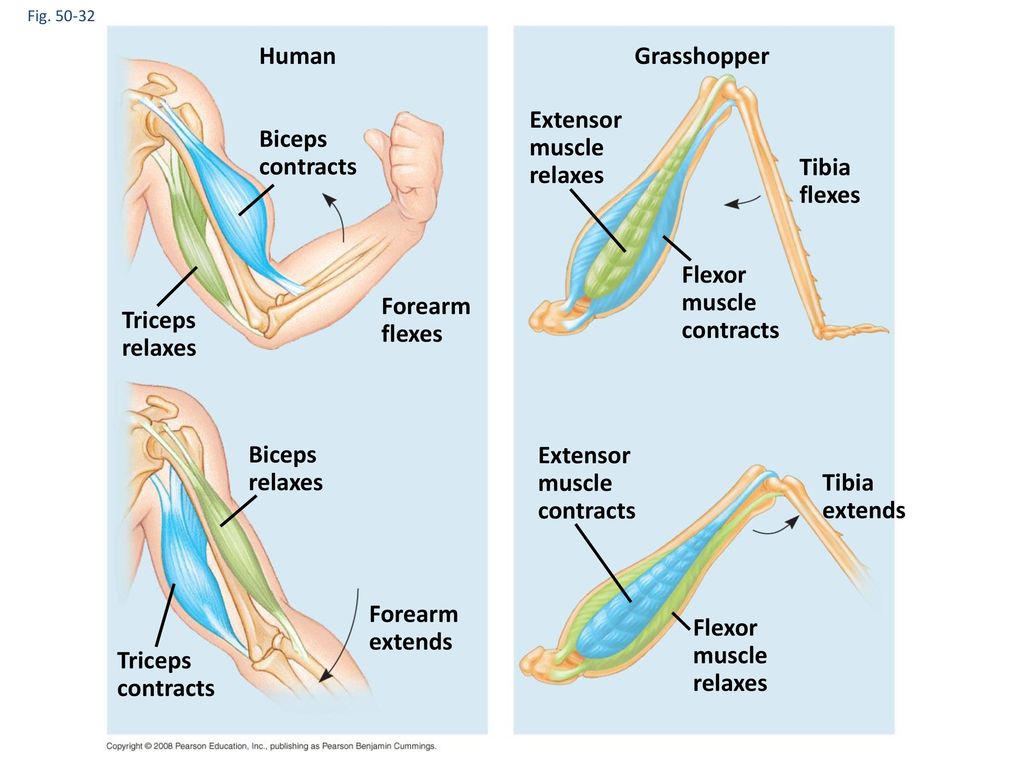 е. определить какая является агонистом, какая — антагонистом.
е. определить какая является агонистом, какая — антагонистом.
Как наглядно было показано в посте Схемы массажа — исследования http://healthy-back.livejournal.com/178027.html и Схемы массажа http://healthy-back.livejournal.com/178505.html, именно при сколиозе нам это не светит.
2) Вы устраните причину напряжения агониста (первой мышцы).
Если бы это легко делалось, проблемы сколиоза не стояло бы вообще. Я не рассматриваю это как задачу, подвластную массажисту или инструктору ЛФК. Именно неспособность устранить причину напряжения мышц является причиной того, что даже достигнутая коррекция уезжает (см. http://healthy-back.livejournal.com/220263.html)
Конечно «закачивания» не являются лечением, но они дают хотя бы внешний косметический эффект стройности, то, заради чего большинство и делает операцию. По крайней мере, упражнения более безопасны, чем перерезанные нервы, ткани и сосуды. Кто знает как оно потом все будет функционировать?
О том, что безопасность и лёгкость операций — это профанация, я ещё буду писать. На настоящий момент принципиальный вопрос, ради которого я, собственно, затеял пост — это результат упражнений.
На настоящий момент принципиальный вопрос, ради которого я, собственно, затеял пост — это результат упражнений.
Ситуация такова: как наглядно было показано в посте Схемы массажа — исследования http://healthy-back.livejournal.com/178027.html и Схемы массажа http://healthy-back.livejournal.com/178505.html, при сколиозе наибольшее напряжение мышц имеется со стороны вЫпуклости выше и ниже основной дуги. При грудном сколиозе в результате создаётся впечатление «выпирающей» лопатки.
Но это ещё не всё. При этом идёт напряжение по всей больной половине тела, от стоп до макушки. Скажу сразу и честно — я не знаю что происходит при S-сколиозе, когда две дуги примерно одинаковы, и трудно определить первичную и компенсаторную. Совершенно однозначно при доминирующей односторонней дуге мышцы с её стороны хронически перенапряжены.
При грудном сколиозе, соответственно, напряжены мышцы шеи. Антагонисты мышц шеи с правой стороны — это мышцы шеи спереди и слева. Спереди они и так будут напряжены, будьте уверены. Теперь вопрос — какие мышцы напрячь, чтобы расслабить мышцы шеи с правой стороны? Единственный возможный вариант — мышцы шеи слева. Далее: причины напряжения мышцы шеи справа мы НЕ устранили. В результате мы получим не расслабленные мышцы справа, а напряжённые с обеих сторон + головную боль. По этой причине упражнения «для укрепления мышц шеи» категорически запрещены!!! Всем!!!
Спереди они и так будут напряжены, будьте уверены. Теперь вопрос — какие мышцы напрячь, чтобы расслабить мышцы шеи с правой стороны? Единственный возможный вариант — мышцы шеи слева. Далее: причины напряжения мышцы шеи справа мы НЕ устранили. В результате мы получим не расслабленные мышцы справа, а напряжённые с обеих сторон + головную боль. По этой причине упражнения «для укрепления мышц шеи» категорически запрещены!!! Всем!!!
Теперь, что касается «косметики», что касается упражнений, ЛФК, и, в частности, Шрот.
Для устранения визуального эффекта «выпирающей лопатки» они предлагают… её поджимать. То есть, снова напрягать и без того напряжённые мышцы. Мне такое прописывал супер-квалифицированный физический терапевт. Визуально сначала действительно создаётся эффект улучшения осанки. А через 2 (два) месяца регулярных занятий пошли спазмы по всей половине спины и головные боли.
См. кто не видел пост Истории ухудшений состояний позвоночника после физзанятий http://healthy-back. livejournal.com/69618.html
livejournal.com/69618.html
Короче, у этого косметического эффекта может быть нехилый побочный. См. на Наилю, спрогрессировавшую от упражнений в 25 лет при внешнем улучшении.
При поясничном сколиозе, ситуация несколько иная. Объясняется она тем, что там относительно легко можно изолировать мышцы-антагонисты и подкачать их без особо тяжёлых последствий для здоровья. Там можно попробовать как раз запустить этот принцип «тонизировав антагонист, мы расслабим агонист». У меня не очень много информации именно по поясничному сколиозу, и гарантировать безопасность экспериментов и упражнений я не могу, хотя и знаю пример именно улучшения косметического эффекта в результате упражнений. Да хотя бы пример двух девочек на фото выше касается именно поясничного отдела.
Поэтому я говорил, говорю, и ещё раз повторяю: внешний вид и реальное положение дел, реальное положение дуги — это ДВЕ БОЛЬШИЕ РАЗНИЦЫ.
Дублирую сюда информацию из поста Методы диагностики http://healthy-back. livejournal.com/45117.html
livejournal.com/45117.html
Топография — это попытка количественно выразить то, что происходит с поверхностью спины, чтобы иметь какой-то критерий состояния спины, описывающий, как спина выглядит.
Достоинства метода:
— Безвредность. Можно выполнять хоть пять раз в день.
— Цена и
— Занимаемое время небольшие.
Физически это выглядит так: устанавливается источник направленного света, прямо перед которым ставится клиент. На источник света помещается частая решетка — тёмные полоски могут быть непрозрачными или окрашенными. Свет, падающий на поверхность тела человека, преломляется, и в результате прохождения через решетку изгибы тела становятся видны. Это всё фотографируется, изображение передаётся на компьютер, обрабатывается специальными программами, и на выходе получаются некие цифры, к помощью которых можно попытаться оценить как обстоят дела.
Вот на одной фотографии ребенок с процессе выполнения топографии, на второй — графики и цифры, которые получаются после обработки информации компьютером.
Прошу обратить внимание — для получения более полной информации могут выполняться снимки в разных позах (называются «функциональные пробы»), и графики составляются на основе неких статистических данных, некой теории, догадки какому искривлению позвоночника какой соответствует рельеф спины.
По той причине, что при выполнении топограммы очень велик человеческий фактор и программное обеспечение, выпонять топограммы в разных местах или у разных лаборантов просто не имеет смысла.
Диагностическая ценность топографа — примерно такая же, как у обычной хорошо выполненной фотографии.
Пример: топограммы двух девочек. Фото отсюда:
http://www.scoliosisjournal.com/content/2/1/18/figure/F1 У обеих сколиоз по 40 градусов, и посмотрите какая разница во внешнем виде и рельефе. Большая разница в угле ротации.
Ценность топографа для оценки эффективности лечения одного и того же человека — ещё раз — топограф — это прибор, который позволяет в цифрах выразить внешний вид. Как
Как сиськи грудь. Ни больше, ни меньше. Кое о чём такие цифры могут говорить, но объективным показателем НЕ являются.
Ещё ссылки по теме:
http://proceedings.jbjs.org.uk/cgi/content/abstract/88-B/SUPP_II/228-c
http://www.ncbi.nlm.nih.gov/pubmed/15456004
http://www.ncbi.nlm.nih.gov/pubmed/11224901
Ещё такой момент — как было написано выше, для превращения полосатой фотографии в цифры используется некая программка. Так вот, программка эта использует статистические данные для подростков. Именно поэтому выполнение топограмм для взрослых достаточно бессмысленно — программа не в состоянии учесть тип телосложения, толщину жира и мышц у взрослого человека.
Пример, который станет хрестоматийным в пояснении того, что внешний вид, отражаемый фотографией и топограммой, и реальное положение дел — это две большие разницы.
Сожалею, темка была в открытом доступе до середины мая 2008г, где и была мною скопирована, но потом была убрана, так что ссылку дать не могу.
Моё личное мнение по поводу изменений на фото с женщиной:
1) Женщина совершенно явно стала поджимать лопатку. Осознанно она это делает, неосознанно, сознательно, несознательно, подсознательно, работа с психикой была проделана или упражнения — какая разница. Факт тот, что она стала напрягать определённые группы мышц.2) Мной лично такой этап пройден с помощью упражнений. Лопатка прекрасно поджималась, всё выглядело чудесно. А потом это мышечное напряжение стало распространяться по всей больной половине, снова пошли спазмы и головные боли.
3) На рентгене, конечно, никаких изменений нет, что ещё раз доказывает: сколиоз — это 1) НЕ нарушения осанки 2) только напряжением, тренировками мышц он не лечится.
Так вот, если кто ещё не понял: сколиоз и осанка — это два параллельных явления. Запишите, запомните, не делайте ошибок когда «коррекцию осанки» Вам попытаются продать как «лечение сколиоза».
Как случилось, что осанка и сколиоз — явления параллельные
Поясняю популярно,для невежд. Есть два варианта развития событий:1) Его придерживался весь мир лет сто назад, его придерживаются врачи, пациенты и их родители советского воспитания по сей день:
человек сидит криво -> лопатка торчит -> эта торчащая лопатка вытягивает позвоночник вбок.
В соответствии с этой теорией, конечно, достаточно сесть ровно, поджать лопатку, и в детском, во всяком случае, возрасте позвоночник выпрямится. Однако, практика — критерий истины, и на практике этого не происходит. Ни в детском, ни во взрослом возрасте — ни ношение корсетов, ни выполнение укрепляющих упражнений, ни поддержание ровной осанки НЕ ПОМОГАЮТ ВЫПРЯМИТЬ САМ ПОЗВОНОЧНИК. Значит, вся эта теория не верна, по-моему, это очевидно.
2) Позвоночник искривляется -> выталкивает лопатку вбок -> создаётся впечатление плохой осанки и кривого сидения.
Картинки:
http://foto.radikal.ru/f.aspx?j06121c4e8b18b496jpg
http://foto.radikal.ru/f.aspx?j061274c26b44a6c5jpgВ соответствии с этой теорией как Вы ни садитесь
всё в музыканты не годитесь, как ни вставайте и ни делайте упражнения — пока позвоночник стоит криво, лопатка будет торчать, осанка будет выглядеть плохо. Эта теория подтверждается практикой. Прооперированные пациенты, конечно, не тот пример, который мне хотелось бы привести, но, заметьте — после операций ничего у них вбок не заваливается и не торчит даже без выполнения всяких специальных упражнений. А вот у тех, кто поджимал лопатки и вытягивал позвоночник мышцами, и, вроде, выглядел хорошо, но реальной коррекции позвоночника не получил, потом всё снова уезжает.
 radikal.ru/f.aspx?j06121c4e8b18b496jpg
radikal.ru/f.aspx?j06121c4e8b18b496jpgЧто касается внешнего вида и корсета (http://healthy-back.livejournal.com/168340.html):
http://www.pubmedcentral.nih.gov/articlerender.fcgi?artid=1559640
Клиническое улучшение и радиографическая прогрессия у девочки с ранним началом сколиоза, прошедшей консервативное лечение.Методы
Лечение пациентки началось в 13 лет, до менархе, С тестом Таннера II и уголом Кобба 60° в грудном отделе и 59° в поясничном. Угол ротации туловища по сколиометру был 13° в грудном отделе и 13° в поясничном. Мы документировали данные этой пациентки в течение периода лечения 27 месяцев, до 2 лет после начала менархе.
Результаты
После лечения в течение 27 месяцев угол Кобба возрос до 74° в грудном отделе и 65° в поясничном. Угол ротации по Раймонди (Рамуни) возрос с 26° в грудном отделе и 28° в поясничном до 30° в грудном отделе 28° в поясничном. Угол ротации туловища улучшился до 12° в грудном отделе и 5° в поясничном, в то время как боковое отклонение улучшилось с 22,4 мм до 4,6 мм и средняя ротация поверхности улучшилась с 10,6° до 6°. На рентгене снижение декомпенсации было видимым. Пациентка была довольная косметическим результатом.
Заключение
Консервативное лечение может улучшать косметический вид, что время как радиографически дуга прогрессирует.
1) корсет Риго-Шено может улучшать косметический вид, изменяя форму грудной клетки, в то время как дуга сама слишком неподатлива, чтобы быть откорректированой
2) снижение декомпенсации ведёт к значительным косметическим улучшениям
3) что пациентка набрала вес, и таким образом, деформация маскируется. Тем не менее, дополнительный вес пациентки не может объяснить косметические улучшения в данном случае.Специалисты в лечении сколиоза должны знать о факте, что может случиться прогрессия дуги, даже если клинические результаты говорят об улучшении.
 Это может быть объяснено тем, что
Это может быть объяснено тем, что Но я и чувствую себя лучше, когда занимаюсь!
И прекрасно! И продолжайте заниматься, если Вы точно знаете что хорошо, а что плохо для Вас! Однако, уважайте и учитывайте опыт других — на меня, я повторяюсь, физическая активность, даже тщательно подобранная, сказывается ОТРИЦАТЕЛЬНО, на десятки других — тоже. См. Истории ухудшений состояний позвоночника после физзанятий http://healthy-back. livejournal.com/69618.html. Поэтому утверждать, что физическая активность ВСЕМ полезна и показана на основании чьего-то частного опыта не есть проявление грамотности.
livejournal.com/69618.html. Поэтому утверждать, что физическая активность ВСЕМ полезна и показана на основании чьего-то частного опыта не есть проявление грамотности.
Например, при гиперкифозе и крыловидной лопатке ромбовидные мышцы и нижняя порция трапециевидной будут ослаблены и напряжены. Расслаблять и удлинять нужно будет переднезубчатую и малую грудную. А потом укреплять, тренировать ромбовидные и нижнюю трапецию. Но повторюсь — потом, на втором этапе лечения.
Ещё раз — сочетание «ослаблены И напряжены» говорит о слабости перенапряжения. См. http://healthy-back.livejournal.com/178505.html#weakness. Метод лечения — покой и расслабление. Укреплениями и тренировками вы добьётесь только рецидива.
Помимо непосредственно укрепления мышц существует двигательный стереотип. Даже при ослаблении мышц наработанный правильный стереотип остаётся.
Гладко было на бумаге, да на местности овраги. Теория звучит волшебно. Встречный вопрос: что мы называем «правильным двигательным стереотипом»? Симметричное, одинаковое движение? Но это неверно.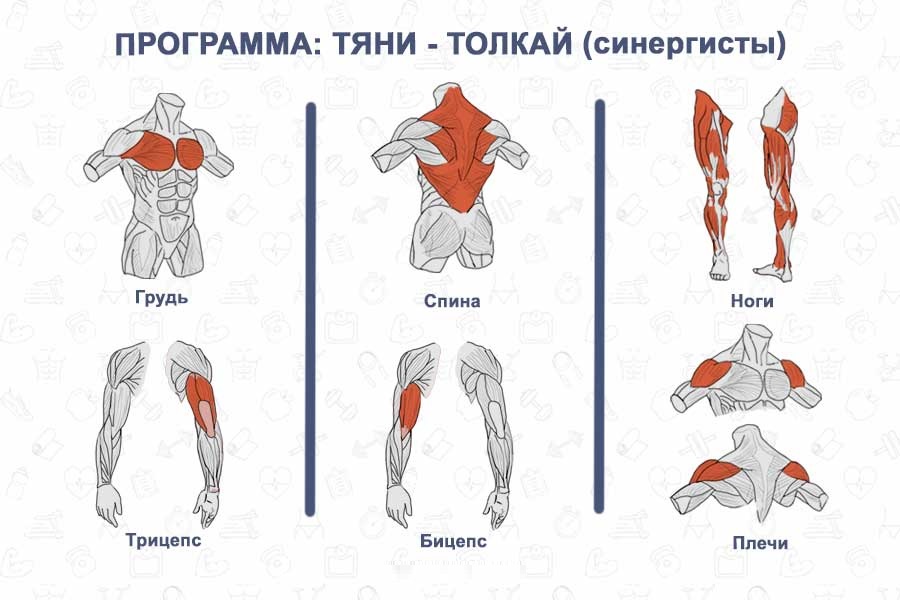 Человек по определению двигается асимметрично: движение начинается с одной ноги, потом её сменяет другая. И стоит здоровый человек не на обеих ногах по стойке «смирно», а сменяя ноги («Ортопедическая диагностика», Маркс В.О.) Это, кстати, единственная умная мысль на всю книгу. Поджимание лопатки мы будем называть «правильным двигательным стереотипом»? Я уже выше написал — оно выглядит правильно, но по сути является ятрогенным (ухудшающим ситуацию, увеличивающим напряжение). Сколиоз — это следствие перенапряжение мышц, которое, в свою очередь, является защитной реакцей организма на травмирующее событие или явление. Как насморк, кашель или высокая температура. Как наморк или кашель, он, несомненно, неприятен и является показателем нездоровья. Но просто так забивая его, мы добиваемся разрушения защитной реакции организма и, как следствие, ухудшения состояния пациента.
Человек по определению двигается асимметрично: движение начинается с одной ноги, потом её сменяет другая. И стоит здоровый человек не на обеих ногах по стойке «смирно», а сменяя ноги («Ортопедическая диагностика», Маркс В.О.) Это, кстати, единственная умная мысль на всю книгу. Поджимание лопатки мы будем называть «правильным двигательным стереотипом»? Я уже выше написал — оно выглядит правильно, но по сути является ятрогенным (ухудшающим ситуацию, увеличивающим напряжение). Сколиоз — это следствие перенапряжение мышц, которое, в свою очередь, является защитной реакцей организма на травмирующее событие или явление. Как насморк, кашель или высокая температура. Как наморк или кашель, он, несомненно, неприятен и является показателем нездоровья. Но просто так забивая его, мы добиваемся разрушения защитной реакции организма и, как следствие, ухудшения состояния пациента.
Обезболивающее в мышцах — Серола
Иногда мы чувствуем ломоту и боль в мышцах, и мы не уверены, что лучше всего сделать, чтобы найти облегчение.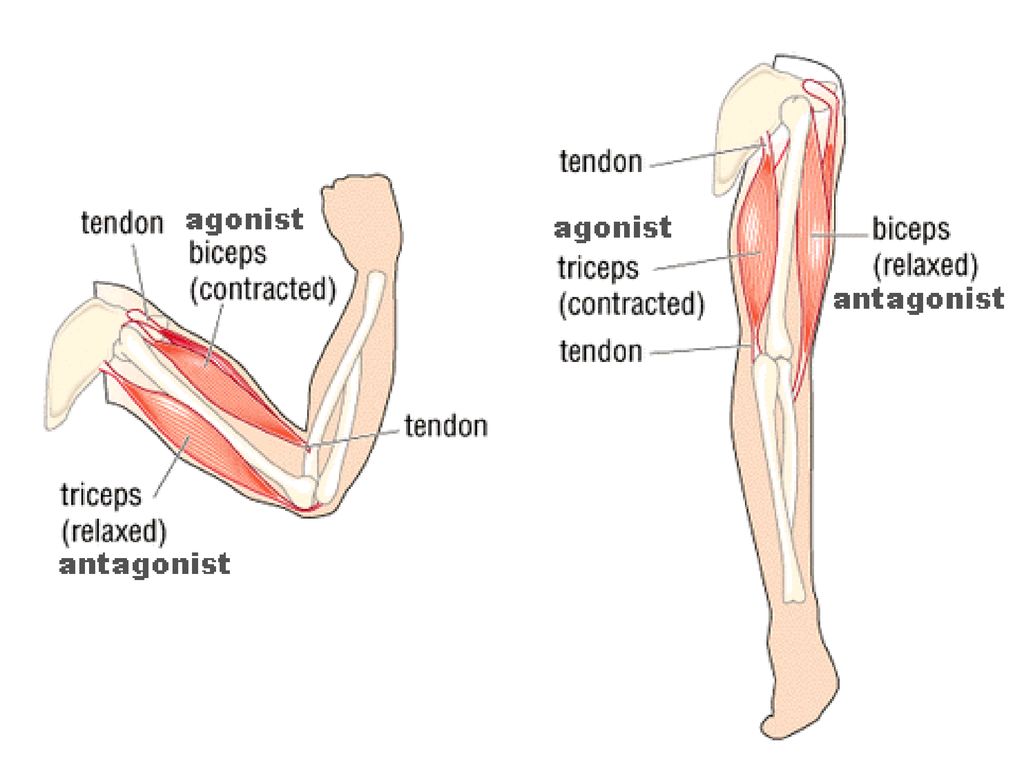
Во-первых, мы должны понять мышечный тонус, то есть состояние напряжения мышцы в состоянии покоя. Сбалансированный мышечный тонус обеспечивает большую силу, энергию, гибкость, реактивность и общее состояние здоровья. И наоборот, несбалансированный тон может уменьшить все вышеперечисленное. Вопрос в том, что мы подразумеваем под «сбалансированным»?
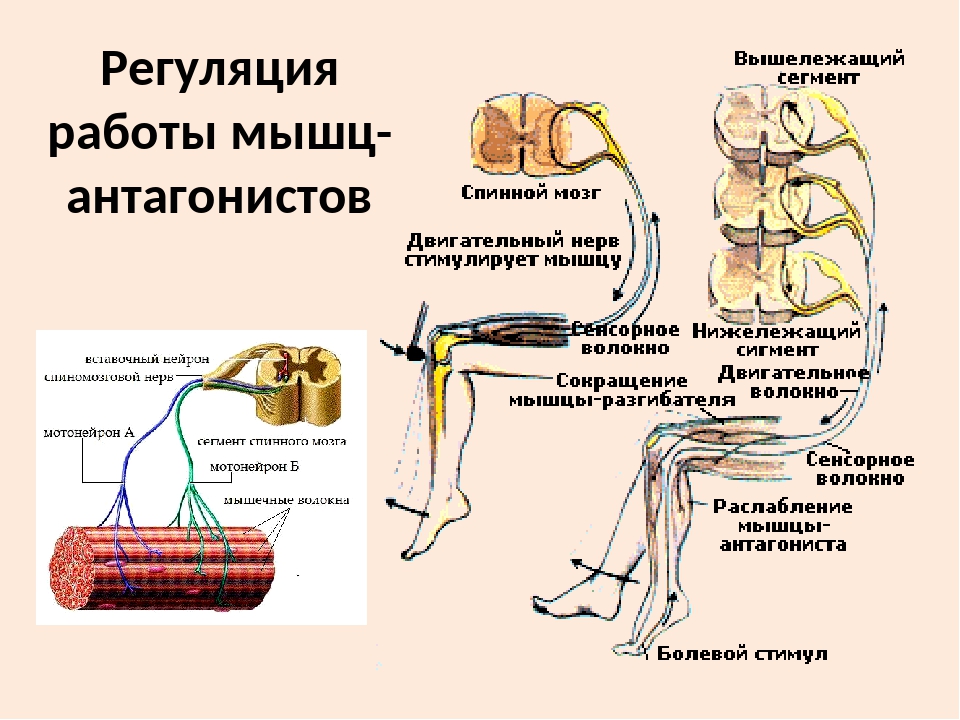
Возьмем, к примеру, локоть. Во время сгибания двуглавая мышца плеча и т. Д. (Агонисты) сгибают локоть, в то время как трицепс и т. Д. (Антагонисты) отпускают сустав, чтобы он мог сгибаться. По мере увеличения напряжения у агонистов оно уменьшается у антагонистов, но оба остаются в достаточном тонусе, так что напряжение в самом суставе остается относительно постоянным.
Мышцы сами себя не регулируют, т. Е. Есть еще один элемент, который требует сбалансированного напряжения; связки внутри самого сустава. Точно так же, как отношения мышц-агонистов / антагонистов, существуют аналогичные отношения между мышцами, которые перемещают сустав, и связками внутри сустава. Более подробное объяснение см. В следующих разделах: Роль мышц и связок в напряжении суставов.
Когда сустав травмируется, отношения нарушаются из-за растяжения связок в суставе. В игру вступают рефлексы, которые напрягают мышцы, которые отводят сустав от травмы (становятся гипертоническими), и подавляют те, которые перемещают сустав в сторону травмы (становятся гипотоническими). Чтобы поддерживать сбалансированное напряжение в травмированном суставе, мышцы становятся неуравновешенными. Это служит примером пословицы о том, что связки управляют, а мышцы адаптируются.
Оба набора мышц могут страдать от нарушения кровообращения, потому что они больше не могут эффективно качать кровь. Снижение кровообращения уменьшает количество кислорода, который достигает тканей, и уменьшает удаление продуктов жизнедеятельности клеток, что может привести к боли.
Снижение кровообращения уменьшает количество кислорода, который достигает тканей, и уменьшает удаление продуктов жизнедеятельности клеток, что может привести к боли.
Ключ в том, чтобы увеличить кровообращение; мы можем сделать это многими способами. Вот обобщение некоторых популярных методов, включая преимущества и недостатки:
|
|
|
|
|
|
|
|


Обезболивание не всегда означает исцеление. Методы облегчения боли и повышения качества жизни доступны, но не всегда понятны даже многим профессионалам. Обладая знаниями, вы сможете оценить варианты лечения и сделать для себя лучший выбор. Надеюсь, эта статья даст вам представление о том, что вы можете делать, когда страдаете от мышечной боли. При любой травме самое главное, что вы можете сделать, — это подумать!
Как функционируют мышцы-антагонисты и мышцы-синергисты?
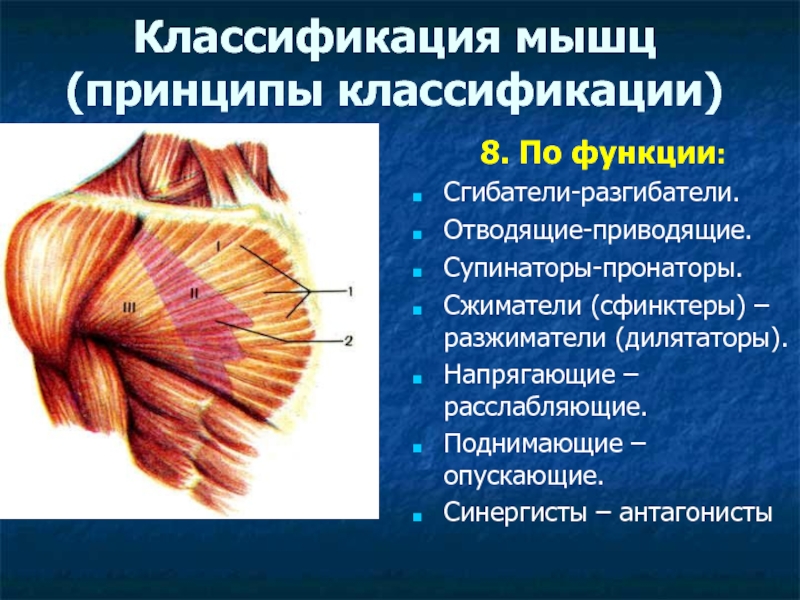
Каждая мышца организует только какое-то определенное движение, например обеспечивает сгибание руки. Поэтому противоположные движения выполняют разные мышцы. Мышцы, работающие вместе для выполнения одного движения (например, сгибания), называются синергистами, а мышцы, производящие противоположные действия (в нашем примере разгибание), — антагонистами.
Поэтому противоположные движения выполняют разные мышцы. Мышцы, работающие вместе для выполнения одного движения (например, сгибания), называются синергистами, а мышцы, производящие противоположные действия (в нашем примере разгибание), — антагонистами.Найдите примеры мышц — антагонистов и синергистов.
Мышцы, сокращающиеся в одном направлении, называются синергистами, а мышцы, выполняющие противоположные движения, — антагонистами. Действие любой мышцы может происходить только при одновременном расслаблении мышцы-антагониста.
Например, группа мышц, сгибающих сустав, работает в паре с группой мышц, разгибающих сустав. Такие группы мышц, совершающие противоположные движения, называют антагонистами. Бицепсы и трицепсы — основные мышцы из группы антагонистов, которые, соответственно, сгибают и разгибают руку в локте. Среди других основных функциональных групп мышц можно назвать четырехглавую мышцу бедра (каждая из четырех ее составляющих действует специфически, что позволяет разгибать ногу в колене и сгибать в бедре) и подколенные мышцы (сгибают ногу в колене и разгибают в бедре) .
Мышцы-агонисты, или мышцы основного действия, реализуют определенное движение, развивая для этого основную силу, развивая для этого основную силу. Например, главная мышца груди является основной двигательной мышцей грудной клетки при сгибании руки. Мышцы-антагонисты действуют в противоположном мышцам основного действия направлении. Например, антагонистом двуглавой части руки (предплечье) является трехглавая мышца плеча — агонист вытягивания руки. Мышцы-синергисты работают вместе с мышцами-агонистами, совершая то же движение, или гасят ненужные движения, возникающие при сокращении агонистов. Например, мышцы-синергисты стабилизируют сустав запястья, когда мышцы — сгибатели руки, сухожилия которых проходят через сустав запястья, сгибают пальцы.
Пары мышц-агонистов и антагонистов — Мышечная система — Eduqas — Редакция GCSE по физическому воспитанию — Eduqas
Мышцы передают силу к костям через сухожилия. Они перемещают наши кости и связанные с ними части тела, натягивая их — этот процесс называется сокращением мышц.
Однако сокращение мышц не может вернуть кость в исходное положение, и из-за этого мышцы работают в «антагонистических парах мышц». Одна мышца пары сокращается, чтобы переместить часть тела, другая мышца пары затем сокращается, чтобы вернуть часть тела в исходное положение.Мышцы, которые работают таким образом, называются антагонистическими парами .
В антагонистической паре мышц, когда одна мышца сокращается, другая расслабляется или удлиняется. Мышца, которая сокращается, называется агонистом , а мышца, которая расслабляется или удлиняется, называется антагонистом .
Один из способов запомнить, какая мышца является агонистом — это та, которая находится в «агонии», когда вы выполняете движение, поскольку она выполняет всю работу.
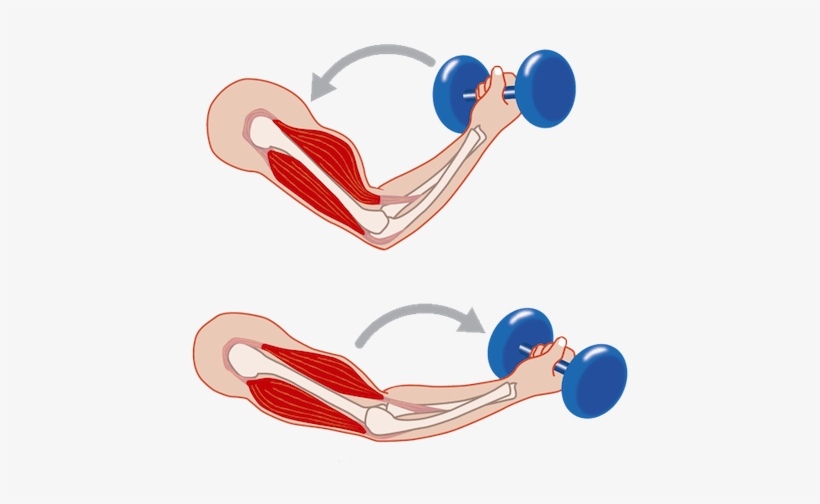
Например, когда вы выполняете сгибание рук на бицепс, бицепс будет агонистом, поскольку он сокращается, чтобы произвести движение, а трицепс будет антагонистом, поскольку он расслабляется, позволяя движению произойти.
Антагонистические пары мышц в действии
Фаза подготовки и контакта в футболе
На этапе подготовки, когда футболист готовится ударить по мячу, его подколенные сухожилия сжимаются от до сгибают колено, в то время как четырехглавая мышца удлиняется, позволяя двигаться .Подколенные сухожилия являются агонистом, а квадрицепсы — антагонистом.
В фазе контакта и восстановления четырехглавые мышцы 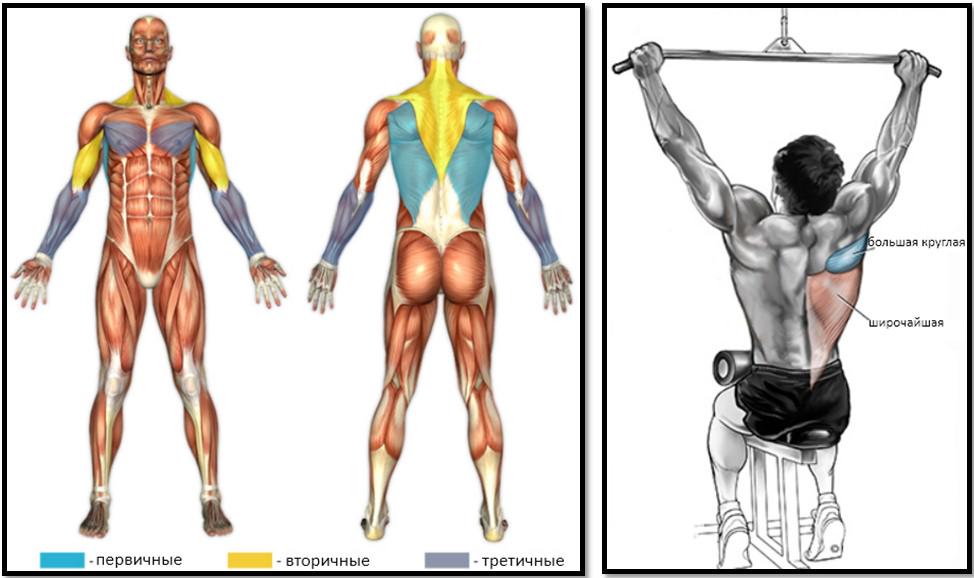 ayn5fomz7u.0.0.0.1:0.1.0.$0.$4.$3.$1″> сокращают – разгибают колено, в то время как подколенные сухожилия удлиняются, позволяя двигаться. Четырехглавая мышца стала агонистом, а подколенные сухожилия — антагонистом.
ayn5fomz7u.0.0.0.1:0.1.0.$0.$4.$3.$1″> сокращают – разгибают колено, в то время как подколенные сухожилия удлиняются, позволяя двигаться. Четырехглавая мышца стала агонистом, а подколенные сухожилия — антагонистом.
- Вопрос
Опишите, как антагонистические пары мышц работают в локтевом суставе во время фазы жима вверх и вниз.
- Показать ответ
Во время фазы опускания трицепсы являются агонистами и эксцентрически сокращаются, чтобы контролировать сгибание локтя, поэтому тело опускается вниз к полу.
Бицепс — антагонист.Во время восходящей фазы трицепс является агонистом и концентрически сокращается, чтобы разогнуть локоть, а бицепс — антагонистом.
 Бицепс — антагонист.
Бицепс — антагонист.Что такое мышцы-агонисты и антагонисты во время тренировок
На большом экране антагонист обычно играет коварную роль. Его или ее цель — подорвать главного героя, создав драму и конфликт. Но в тренажерном зале все по-другому. Каждый раз, когда вы выполняете движение — будь то приседание, сгибание рук, жим, гребля, подъем, выпад, становая тяга или отжимание — все ваши мышцы, включая «антагонистов», работают вместе, чтобы выполнить свою работу.
В контексте вашего тела антагонист — это мышца, которая противостоит действию целевой мышцы. Например, когда вы делаете сгибание рук с гантелями, ваши трицепсы выступают в роли антагонистов. Их основная задача — разгибать локоть, но они расслабляются достаточно, чтобы позволить вашим бицепсам (т. Е. «Агонистам») сгибать ваш локоть и поднимать вес, при этом создавая достаточную силу противодействия, чтобы удерживать движение под контролем. Когда вы делаете разгибание на трицепс, роли меняются местами: ваши бицепсы являются антагонистами, а трицепсы — агонистами.
«Агонистам») сгибать ваш локоть и поднимать вес, при этом создавая достаточную силу противодействия, чтобы удерживать движение под контролем. Когда вы делаете разгибание на трицепс, роли меняются местами: ваши бицепсы являются антагонистами, а трицепсы — агонистами.
Это мышечное взаимодействие проявляется каждый раз, когда вы двигаете суставом, и если вы знаете, как извлечь из этого выгоду в своих тренировках, вы можете увеличить свои результаты, сократив время тренировки вдвое.
Этот контент импортирован из {embed-name}. Вы можете найти тот же контент в другом формате или найти дополнительную информацию на их веб-сайте.
Ваш ход: Упражнения в паре, нацеленные на противоположные группы мышц, в последовательном подходе, известном как суперсеты.Используя эту классическую стратегию бодибилдинга, вы можете чередовать подходы из жима лежа (грудные мышцы) и тяги в наклоне (широчайшие, трапеции, ромбовидные мышцы) или сгибания рук с гантелями (бицепсы) и разгибания черепа (трицепсы).
Ключевым моментом здесь является то, что вы прорабатываете одну группу мышц, позволяя другой группе восстановиться. Таким образом вы избавитесь от необходимости отдыхать между подходами, сократив тренировки, не жертвуя при этом своими достижениями.
Trevor Thieme C.S.C.S. Тревор Тиме — писатель и силовой тренер из Лос-Анджелеса, бывший редактор по фитнесу в Men’s Health.границ | О происхождении мышечной синергии: инвариантный баланс при совместной активации пар мышц-агонистов и антагонистов
Введение
Произвольное движение требует сенсомоторной трансформации между внешней и внутренней системой отсчета (Kandel et al., 2012). Для выполнения движения с определенными характеристиками конечной точки, включая аспекты кинематики, силы и импеданса, сенсомоторное преобразование может напрямую отображать мышечное пространство в пространство задачи; Центральная нервная система (ЦНС) должна регулировать мышечную активность, чтобы соответствовать кинематическим и кинетическим характеристикам конечной точки. Если мышечное пространство напрямую связано с пространством задачи, движение конечной точки можно было бы спланировать или спрогнозировать на основе системы отсчета в мышечном пространстве, в которой кодируются двигательные команды от ЦНС к мышцам.Система отсчета в мышечном пространстве обеспечивает основу для объяснения того, как люди планируют, регулируют и достигают желаемого движения конечной точки при управлении несколькими мышцами выполняющей конечности.
Если мышечное пространство напрямую связано с пространством задачи, движение конечной точки можно было бы спланировать или спрогнозировать на основе системы отсчета в мышечном пространстве, в которой кодируются двигательные команды от ЦНС к мышцам.Система отсчета в мышечном пространстве обеспечивает основу для объяснения того, как люди планируют, регулируют и достигают желаемого движения конечной точки при управлении несколькими мышцами выполняющей конечности.
Однако нервно-мышечно-скелетная система неврологически и механически избыточна. Обратная задача (то есть планирование движения) включает бесконечное количество возможных решений данной задачи. Одна из гипотез для решения этой некорректно поставленной проблемы заключается в использовании стереотипных паттернов координации или мышечной синергии.Синергия — это классы моделей движения, которые представляют собой функциональные группы структурных элементов в регуляции и контроле движения (Bernstein, 1967). Гипотеза синергии подчеркивает, что ЦНС использует функциональную структуру на разных моторных уровнях (нейроны, мышцы и суставы), чтобы упростить моторный контроль. Существует множество доказательств того, что естественное решение проблемы распределения приводит к очень устойчивой кинематике конечной точки (Morasso, 1981; Lacquaniti et al., 1983; Flash and Hogan, 1985; Shadmehr and Mussa-Ivaldi, 1994) и кинетике (Hogan , 1985; Мусса-Ивальди и др., 1985; Флэш и Мусса-Ивальди, 1990; Tsuji et al., 1995), называемые инвариантными характеристиками (Зациорский, Прилуцкий, 2012). Моторная инвариантность может дать ключ к пониманию механизма, лежащего в основе произвольных движений, потому что ЦНС может накладывать или использовать эти ограничения для решения проблемы степеней свободы (Bernstein, 1967), необходимой для моторного контроля.
Существует множество доказательств того, что естественное решение проблемы распределения приводит к очень устойчивой кинематике конечной точки (Morasso, 1981; Lacquaniti et al., 1983; Flash and Hogan, 1985; Shadmehr and Mussa-Ivaldi, 1994) и кинетике (Hogan , 1985; Мусса-Ивальди и др., 1985; Флэш и Мусса-Ивальди, 1990; Tsuji et al., 1995), называемые инвариантными характеристиками (Зациорский, Прилуцкий, 2012). Моторная инвариантность может дать ключ к пониманию механизма, лежащего в основе произвольных движений, потому что ЦНС может накладывать или использовать эти ограничения для решения проблемы степеней свободы (Bernstein, 1967), необходимой для моторного контроля.
Однако это открытый вопрос: является ли мышечная синергия фундаментальными примитивами или следствием других примитивов? Некоторые исследователи считают моторную синергию строительными блоками движения (d’Avella et al., 2006; Латаш, 2008; Cheung et al., 2009; Dominici et al., 2011; Бицци и Чунг, 2013). Однако другие исследователи считают, что по крайней мере некоторые типы моторной синергии — это не примитивы, а совокупность механического сопротивления (Hogan and Sternad, 2012).
Хотя многие аспекты моторного контроля и координации остаются спорными, такие как система отсчета движений, моторная избыточность и моторные примитивы (неврологическое или механическое происхождение моторной синергии), наша цель в этой статье — предоставить некоторые доказательства, подтверждающие концепцию, что мышечно-механический Импеданс может дать ключ к пониманию того, как распутать взаимосвязанные взаимосвязи между моторным управлением.
В нашей предыдущей работе мы пересмотрели синергию мышц с точки зрения машиностроения и связали их с системой отсчета в мышечном пространстве (Uno et al., 2014). Математическая формулировка была теоретически привлекательной, поскольку предполагала, что мышечная синергия была функцией коактивации мышечных пар агонист-антагонист (АА) (то есть композитов механического сопротивления). Более того, мышечная синергия рассматривалась как инвариантные функциональные модули, представляющие систему отсчета в полярных координатах с центром в конкретном суставе (например,г., плечо) у основания туловища. Таким образом, мы предположили, что мышечная синергия является следствием баланса механического сопротивления, который представляет собой систему отсчета в мышечном пространстве.
В этой работе мы исследуем нашу гипотезу с точки зрения моторного контроля, обучения и восстановления. Если мышечная синергия является примитивом для моторного контроля, обучения и восстановления, можно ожидать, что общая синергия будет извлечена из множества различных задач, разных предметов и различных моторных навыков испытуемых.Кроме того, исследование мышечной синергии у субъекта с нейромоторным дефицитом дало бы представление о степени инвариантности мышечной синергии, поскольку фундаментальные двигательные функции могут быть повреждены аномальным мышечным тонусом, что является обычным признаком после неврологической травмы. В этом исследовании мы проверили две экспериментальные парадигмы: (1) мышечная синергия на моторную адаптацию и (2) мышечная синергия на двигательное восстановление. На наш взгляд, синергия мышц сильно связана с механическим сопротивлением. Мы также обсуждаем жесткость конечных точек и сопутствующие виртуальные траектории в контексте мышечной синергии.
Методы
Аппарат
Множественные мышцы нервно-мышечной системы человека отвечают за координацию и регулирование движений при переговорах в динамической среде. Создание систематической основы для объяснения моторной синергии, механического сопротивления и виртуальных траекторий является проблемой для всестороннего понимания моторного контроля и обучения. Предполагая, что исследование множественной мышечной активности приведет к более глубокому пониманию нейронного механизма, лежащего в основе произвольных движений, мы разработали устройство кинезиологического анализа, которое позволяет нам оценивать эти внутренние моторные характеристики по сигналам электромиографии (ЭМГ) во время движения.На рисунке 1 показан обзор системы, которую мы называем «анализатор синергии » . Система состоит из дисплея, стола с экраном, стула с ремнями безопасности, тележки с опорой для рук с шариковыми колесами с низким коэффициентом трения, системы захвата движения и системы измерения ЭМГ.
Рис. 1. Экспериментальная установка. (A) Дисплей ; (В) экранный стол; (C) сигналов ЭМГ; (D) мышечная синергия [ u R ( s ) (вверху слева), u φ ( s ) (вверху справа) и u φ × R ( s ) (внизу слева)]; (E) эллипс конечной жесткости; (F) точка равновесия.Испытуемый выполнил обведение по спирали или кругу недоминантной / доминирующей рукой в горизонтальной плоскости, наблюдая за дисплеем, показывающим идеальную траекторию. ЭМГ-активность во время движений регистрировалась для анализа мышечной синергии, жесткости конечных точек и виртуальных траекторий.
Испытуемые сидели на стуле, зафиксировав оба плеча ремнями безопасности, и выполняли произвольные движения руками, глядя на 65-дюймовый дисплей [или экранный стол размером 1,20 м × 0,86 м (ширина × высота)] перед ними.Верхняя конечность была помещена на опору для рук на уровне плеч, чтобы исключить влияние силы тяжести и ограничить движение руки в горизонтальной плоскости. Чтобы представить верхнюю конечность как двухзвенную конструкцию, сустав запястья был прикреплен к опорной тележке для рук. Во время произвольных движений руки субъекта кинематика и сигналы ЭМГ регистрировались синхронно. Положение каждого сустава (левое плечо, правое плечо, левый или правый локоть, левая или правая рука) верхних конечностей измерялось с помощью оптической системы захвата движения с восемью камерами (OptiTrack; NaturalPoint, Inc., Корваллис, штат Орегон, США) при 100 Гц.
Электромиографические сигналы шести мышц верхних конечностей [задняя дельтовидная мышца, передняя дельтовидная мышца, трехглавая мышца плеча (длинная голова), двуглавая мышца плеча, трехглавая мышца плеча (боковая головка) и плечевой сустав] измерялись с помощью многотелеметрической системы (WEB-5000; Nihon Kohden Corp., Япония) на частоте 1000 Гц. Поверхностные электроды прикрепляли к соответствующим местам на измеряемых мышцах, как описано ранее (Criswell, 2010; Perotto, 2011), после очистки кожи спиртом (<10 кОм).Полученные ЭМГ-сигналы анализировали после следующих процедур: полосовая фильтрация (10–450 Гц), двухполупериодное выпрямление, сглаживание и нормализация до максимального произвольного сокращения (MVC), которое выражалось в процентах от MVC. Мы следовали стандартной процедуре для определения MVC для каждой мышцы (Hislop and Montgomery, 2007). Затем анализатор синергии оценил синергию мышц, жесткость конечных точек и виртуальные траектории на основе измеренных данных движения, одновременно накладывая эти моторные показатели в реальном времени (частота обновления, 10 Гц) на фактические изображения, снятые с камеры вида сверху.Результаты оценки предоставлялись испытуемому на дисплее (или экранной таблице) для использования во время тренировки с биологической обратной связью.
Экспериментальная парадигма
Это исследование было сфокусировано на роли синергии мышц, жесткости конечных точек и виртуальных траекторий во время произвольной тренировки и реабилитации. Чтобы выяснить эволюцию этих моторных характеристик, мы провели два эксперимента.
Эксперимент 1: Моторная адаптация после тренировки
Восемь молодых людей (все мужчины, 23 ± 1 года, правши) вызвались принять участие в первом эксперименте.Ни один субъект не сообщил о нервно-мышечных заболеваниях в анамнезе. Эксперимент был одобрен Наблюдательным советом Института Осаки, и все испытуемые предоставили письменное информированное согласие перед участием.
Каждый испытуемый выполнял трассировку спирали как можно быстрее, не касаясь линий своей недоминантной (левой) рукой в горизонтальной плоскости (рис. 1). Максимальный радиус спирали 21 см. Визуальное представление идеальной траектории и текущего положения руки на дисплее перед испытуемым; идеальная спиральная траектория имела шаг 1.0 см между линиями на дисплее, что эквивалентно 3,5 см в пространстве для задач. Центр спирали в пространстве для задач был отрегулирован так, чтобы соответствовать положению рук каждого испытуемого в естественной позе. Движение включало 5,75 оборотов по часовой стрелке снаружи внутрь. Чтобы ознакомиться с процедурой, испытуемые выполнили 20 испытаний в качестве практики перед первым измерением исходного уровня. Затем испытуемого попросили выполнять задание 50 раз в день в течение 8 дней. В первый и последний дни были измерены кинематические и ЭМГ-сигналы во время выполнения задания для анализа синергии мышц, жесткости конечных точек и виртуальных траекторий.
Эксперимент 2: Восстановление моторики после реабилитации
Два пожилых пациента, здоровый субъект (мужчина, 61 год, правша) и субъект, перенесший инсульт (мужчина, 74 года, правша), добровольно приняли участие во втором эксперименте. Эксперимент был одобрен экспертной комиссией Университета Осаки и больницы Сенри Тюо, и оба субъекта дали информированное согласие. Здоровый субъект был контрольным субъектом того же поколения, что и другой субъект.Пациент, перенесший инсульт, находился в стационаре в острой стадии с правой или умеренной гемиплегией с правой стороны, но был в состоянии поддерживать вербальное общение. Пациент, перенесший инсульт, выполнил эксперимент дважды, до и через 2,5 месяца после реабилитации.
Каждый испытуемый выполнил обводку круга своей доминирующей (правой) рукой в горизонтальной плоскости. Поскольку до реабилитации пациенту, перенесшему инсульт, было сложно выполнить задачу по спиральному прослеживанию, мы выбрали аналогичную траекторию в меньшем круге (радиус: 10 см), чтобы ему было легче выполнить эту задачу.Субъект после инсульта выполнял задание своей пораженной рукой как можно быстрее без какой-либо помощи, в то время как здоровый субъект выполнял задание на медленной скорости (время движения: около 4 секунд), чтобы его движения соответствовали движениям после удара. предмет инсульта. Кинематика и сигналы ЭМГ во время выполнения задачи были измерены для анализа синергии мышц, жесткости конечных точек и виртуальных траекторий.
Анализ данных
Коэффициент AA и сумма AA
Плечо человека было смоделировано как двухзвенная структура с шестью мышцами (рис. 2).Мы выбрали четыре моносуставных мышцы и две двухсуставные мышцы, соответствующие движениям плеча и локтя в горизонтальной плоскости. Выбранные мышцы были проиндексированы следующим образом: задняя дельтовидная ( M s, ext ), передняя дельтовидная ( M s, flex ), трицепс плеча (длинная голова) ( M se, ext ). , двуглавая мышца плеча ( M, se, flex ), трехглавая мышца плеча (боковая головка) ( M, e, ext ) и brachioradialis ( M e, flex ).Эти шесть мышц составляют три пары мышц AA. Пара моносуставных мышц вокруг плечевого сустава ( M s, ext и M s, flex ), пара двухсуставных мышц вокруг плечевого и локтевого суставов ( M se, ext и M se, flex ), а пара моно-суставных мышц вокруг локтевого сустава ( M e, ext и M e, flex ) являются основными функциональными единицами для координации и регулирования движения плечевого и локтевого суставов для управления движением рук; каждая пара мышц состоит из двух мышц, которые имеют противоположные (т.е., агонист и антагонист) функции.
Рис. 2. Модель верхней конечности человека . Скелетно-мышечная структура верхней конечности человека упрощена как двухзвенная модель с шестью мышцами. (A) Три пары мышц-агонистов-антагонистов расположены вокруг плечевого и локтевого суставов. Парные мышцы обозначены одним цветом (красным, зеленым и синим). Пара моносуставных мышц вокруг плечевого сустава ( M s, ext и M s, flex ), пара двухсуставных мышц вокруг плечевого и локтевого суставов ( M se, ext и M se, flex ), а пара моно-суставных мышц вокруг локтевого сустава ( M e, ext и M e, flex ) отвечают за координацию и регулировку плеча и локтя. совместные движения для управления движением рук. (B) Положение руки в плоском пространстве задачи может быть определено в декартовых координатах ( x , y ) или в полярных координатах ( R , φ) с центром на плече. Обратите внимание, что полярные координаты ( R , φ) определяются как положительные, когда конечная точка перемещается от основания тела. Эти координаты являются функциями углов плечевого и локтевого суставов (θ s , θ e ).
Чтобы охарактеризовать двигательные функции пары мышц AA вокруг сустава (суставов), j , мы определили следующие мета-параметры (соотношение AA, r j и сумма AA, s j ) в качестве управляющих переменных:
rj = mj, extmj, ext + mj, гибкий, (j = s, se, e) (1a) sj = mj, ext + mj, гибкий, (j = s, se, e) (1b), где индекс j обозначает сустав (суставы) и соответствует любому из плечевого (-ых), плечевого и локтевого (se) и локтевого (e) суставов; m j, ext и m j, flex — это ЭМГ-активность мышц-разгибателей и сгибателей вокруг сустава (суставов) j .В таблице 1 перечислены моторные функции этих пар мышц AA. Соотношение AA вносит вклад в положение равновесия суставного угла (ов), а сумма AA вносит вклад в механический импеданс сустава (ов). Детали математической теории концепции АА были опубликованы ранее (Ariga et al., 2012; Pham et al., 2014; Hirai et al., 2015).
Таблица 1. Определения и функции соотношения агонист-антагонист (AA) (r) и суммы (s) AA .
Мышечная синергия
Одной из гипотез пространственного и временного контроля движений конечностей с помощью нескольких мышц является использование иерархической координации. В предыдущем разделе мы рассматривали координацию мышц-агонистов и антагонистов как самый низкий уровень координации. В этом разделе объясняется следующий уровень координации, внутриконечная координация, и развивается концепция AA в рамках модели, показанной на рисунке 2. Чтобы вывести взаимосвязь между точками равновесия, отношениями AA и суммами AA, мы использовали следующие допущения: ( 1) каждую мышцу можно описать как пружинную систему, коэффициент упругости и естественная длина которой регулируются в соответствии с сигналом ЭМГ; (2) плечо момента каждого шарнира одинаковое и постоянное; и (3) длины плеча (от плечевого сустава до локтевого сустава) и предплечья (от локтя до центра запястья) равны.В математическом смысле предположение (1) означает, что сократительная сила мышцы F ( м ) может быть выражена как
F (м) = К (м) (l — l0 (м)) (2), где K ( м ) — жесткость мышцы на уровне активности ЭМГ м , а l и l 0 ( м ) — длина мышцы и естественная длина мышцы при ЭМГ. уровень активности м . K ( м ) и л 0 ( м ) —
и
, где C 1 , C 2 , C 3 и C 4 — постоянные коэффициенты, которые представляют свойства мышцы.Детали нашего предположения с математической формулировкой были опубликованы ранее (Ariga et al., 2012; Hirai et al., 2015). Основываясь на этих предположениях, можно описать смещение углов равновесного сочленения на плече и локте, θ EP = (θ s, EP , θ e, EP ) T . со следующим уравнением, используя отношения AA и суммы AA (Pham et al., 2014; Uno et al., 2014; Hirai et al., 2015):
(Θs, EPθe, ЕР) = С (sssse + sssesssse + Sesse + sssesessesssse + Sesse + sssesessesssse + Sesse + sssessssesssse + Sesse + sssessssesssse + Sesse + sssesesse + sssesssse + Sesse + SSSE) × (RS-12rse- 12re − 12) θEP = C (qsT (s) qeT (s)) (r − 12) (5), где C — коэффициент, определяемый характеристиками мышцы и моментом плеча, r — вектор отношения AA ( r s , r se , r e ) T , s — вектор суммы AA ( s s , s se , s e ) T и q s ( s ) и q e ( s ) определяются следующим образом:
qs (s) = 1sssse + sesse + ssse (sssse + ssse, sesse, −sesse) T (6a) qe (s) = 1sssse + sesse + ssse (-sssse, sssse, sesse + ssse) T (6b)Обратите внимание, что q s ( s ) и q e ( s ) состоят только из суммы AA.Как показано в уравнении (5), соотношение AA линейно управляет углом равновесного сочленения, если q s ( s ) и q e ( s ) удовлетворяют условию постоянства. Однако есть одна проблема — резервирование двигателя: размер пространства передаточного отношения AA всегда превышает размер суставного пространства. Гипотеза синергии подчеркивает использование координации в решении этой некорректно поставленной проблемы (Bernstein, 1967).Мы использовали эту гипотезу, чтобы представить метод извлечения синергии мышц из модели опорно-двигательного аппарата человека. Суть этой техники состоит в том, что ВП в конечной точке описывается на основе системы полярных координат с центром на плече (рис. 2). Кинематика плеча с двумя степенями свободы с углом плеча θ s и углом изгиба θ e определяет уникальное положение конечной точки, p = ( R , φ) T , в полярных координатах:
p = (Rϕ) = (2Lcos | θe | 2π− (θs + θe2)) (7), где L — длина плеча и предплечья.Рассматривая небольшое отклонение p и подставляя уравнение. (5) в уравнение. (7), мы можем получить отношения между конечной точкой EP, отношениями AA и суммами AA:
ΔpEP = JRϕ (θ) ⋅ΔθEP = (CR (θe) 00Cϕ) (qeT (s) (qs (s) + qe (s) 2) T) (ΔrsΔrseΔre) ≈ (CR00Cϕ) (qeT (s) (qs ( s) + qe (s) 2) T) (ΔrsΔrseΔre) (8)где JRϕ (θ) (= ∂ (R, ϕ) T∂ (θs, θe)) — матрица Якоби, которая связывает пространство суставов с пространством задач, описанным в полярных координатах; C R (θ e ) и C φ — это коэффициенты, определяемые характеристиками мышц, моментным плечом каждого сустава и длиной плеча / предплечья L .Кроме того, CR (θe) (= CϕLsin | θe | 2) можно аппроксимировать как постоянную CR (= CR (θ¯e)), когда локоть достаточно согнут во время движения, где θ¯e — средний угол локтевой сустав. Замечательной особенностью нашего метода является то, что формулировка основана на полярных координатах. Благодаря хорошей линейной аппроксимации между пространством задач, описанным в полярных координатах, и пространством суставов (Mitsuda et al., 1997), вышеуказанное уравнение удовлетворяется в относительно широком диапазоне рабочего пространства. Уравнение (8) указывает, что смещение конечной точки EP в полярных координатах может быть оценено путем проецирования трехмерного вектора отношения AA Δ r [= (Δ r s , Δ r se , Δ r e ) T ] на двумерное подпространство, состоящее из C R q e ( s ) и Cϕ (qs (s) + qe (s) 2).Основываясь на этой информативной взаимосвязи, мы определили векторы мышечной синергии как
. uR (s) = qe (s) | qe (s) | (9а) uϕ (s) = qs (s) + qe (s) 2 | qs (s) + qe (s) 2 | (9b) uR × ϕ (s) = uR (s) × uϕ (s) | uR (s) × uϕ (s) | (9c), где u R ( s ) и u φ ( s ) указывают единичные векторы для распределений вектора отношения AA в радиальном и тангенциальном направлениях. направлений, а u R × φ ( s ) определяется как единичный вектор в нулевом направлении (т.е.е., нулевое пространство). Синергия мышц в нулевом направлении не рассматривается как непосредственный вклад в движение конечной точки EP, но, как считается, регулирует жесткость конечной точки (Uno et al., 2014). Эти векторы синергии являются основой для движения конечной точки EP в радиальном, тангенциальном и нулевом направлениях. Обратите внимание, что синергия мышц зависит только от суммы AA. В нашем определении мышечная синергия представляет собой баланс механического сопротивления за счет совместной активации мышц AA и играет роль системы отсчета в мышечном пространстве для конечного движения EP.Стоит отметить, что синергия мышц становится постоянной, когда q s ( s ) и q e ( s ) удовлетворяют условию постоянства. Это предположение нетривиально, но его справедливость (т.е. инвариантность мышечной синергии) подтверждается в следующих разделах.
Конечная жесткость
Конечная жесткость — это еще один показатель механического сопротивления, в то время как синергия мышц указывает на баланс механического сопротивления за счет совместной активации мышц AA.Предполагая линейную зависимость между активацией отдельной мышцы и соответствующей жесткостью мышц, жесткость сустава K j ( s ) в статическом состоянии может быть выражена как следующая функция от сумм AA:
Kj (s) = kj (ss + ssessessese + sse) (10), где k j Н · м / рад — константа усиления для преобразования сумм AA в жесткость соединения. В динамических условиях, таких как наличие силовой нагрузки, требуется дополнительный член, зависящий от положения руки и силы руки (McIntyre et al., 1996). Однако мы проигнорировали этот эффект для простоты, предполагая, что сила руки была минимальной для нашей задачи. Тогда конечная жесткость K e ( s , θ ) может быть получена следующим образом:
Ke (s, θ) = (JxyT (θ)) — 1⋅Kj (s) ⋅Jxy − 1 (θ) (11), где Jxy (θ) (= ∂ (x, y) T∂ (θs, θe)) — матрица Якоби, которая связывает совместное пространство с пространством задач в декартовых координатах. Матрица жесткости в конечных точках может быть графически представлена в виде эллипса жесткости, рассчитанного на основе собственных значений и собственных векторов матрицы (Hogan, 1985; Mussa-Ivaldi et al., 1985; Флэш и Мусса-Ивальди, 1990).
Виртуальные траектории
Путем проецирования вектора отклонения отношения AA на векторы мышечной синергии, мы можем получить изменение EP в конечной точке. Мы определили отклонение коэффициентов активации синергии (Δ w R , Δ w φ и Δ w R × φ ) как внутренние продукты векторов мышечной синергии [ u R ( s ), u φ ( s ) и u R × φ ( s )] и вектор отклонения отношения AA Δr (= r − r¯), где r¯ — отношение AA в базисной позиции.
ΔwR = uRT (s) ⋅Δr = uRT (s) ⋅ (r − r¯) (12a) Δwϕ = uϕT (s) ⋅Δr = uϕT (s) ⋅ (r − r¯) (12b) ΔwR × ϕ = uR × ϕT (s) ⋅Δr = uR × ϕT (s) ⋅ (r − r¯) (12c)Отклонение конечной точки EP выражается как
. (ΔREPΔϕEP) = (αRΔwRαϕΔwϕ) (13), где α R и α φ — константы усиления для настройки масштаба коэффициентов активации мышечной синергии в соответствии с масштабом виртуальной траектории, а α R и α φ соответствуют C R и C φ в уравнении.(8). Смещение конечной точки EP в полярных координатах, p EP = ( R EP , φ EP ) T , может быть вычислено из линейной комбинации коэффициентов активации мышечной синергии. как
pEP = (REPϕEP) = (R¯EP + ΔREPϕ¯EP + ΔϕEP) = (R¯EP + αRΔwRϕ¯EP + αϕΔwϕ) (14)где R¯EP и ϕ¯EP — полярные координаты конечной точки EP в базовой позиции. В состоянии покоя в базовой позиции мы предположили, что фактическая позиция и позиция EP в конечной точке стали равными.Наконец, конечная точка EP в декартовых координатах может быть получена следующим преобразованием:
(xEPyEP) = (REPcosϕEPREPsinϕEP) (15)Виртуальная траектория — это временной ряд, представляющий собой последовательность EP в конечной точке. EP может быть представлен как точка в конфигурационном пространстве мышечной синергии, а виртуальная траектория может быть идентифицирована путем отслеживания точки во времени в мышечной синергии. Контрольный контроль, основанный на EP или виртуальных траекториях, то есть гипотезе EP (Feldman, 1966, 1986; Feldman et al., 1990; Feldman and Latash, 2005), была влиятельной гипотезой в отношении моторного контроля. Наша формулировка может помочь объединить различные идеи мышечной синергии, жесткости конечных точек и виртуальных траекторий.
Результаты
Эксперимент 1: Синергетический анализ моторной адаптации
Спиральный тест — надежный измеритель точности и скорости движений верхних конечностей; он обычно используется в реабилитации в качестве качественной оценки для обеспечения обратной связи с пациентами с нарушениями координации, такими как мозжечковая атаксия или болезнь Паркинсона (Verkerk et al., 1990). Мы приняли этот показатель в качестве показателя, чтобы отразить эволюцию движений недоминантной руки посредством произвольной тренировки, хотя испытуемые были неврологически и физически нетронутыми. Испытуемым оценивали время, затраченное на выполнение задания, с добавлением штрафного времени за касание или пересечение линий; Оценка определялась как сумма времени, затраченного (от начала до гола), количества касаний спиральной линии, умноженного на 3, и количества раз, когда спиральная линия пересекалась, умноженного на 5.Оценка кинематики значительно улучшилась для восьми испытуемых за 8 дней обучения. Средний балл по всем предметам составил 62,1 ± 23,3 (среднее ± стандартное отклонение) в первый день и 23,3 ± 11,8 в последний день, соответственно, что указывает на улучшение двигательной активности.
На рисунке 3 показано типичное соотношение AA и сумма AA до и после обучения для одного предмета (предмет №1). Коэффициент AA — это независимая переменная в диапазоне от 0 до 1, а сумма AA — это независимая переменная в диапазоне от 0 до 2.Соотношение AA и сумма AA показывают степень увеличения углов равновесного сочленения и увеличения жесткости сочленения, соответственно. Обратите внимание, что обе переменные меняются со временем, потому что они рассчитываются на основе сигналов ЭМГ во время движения.
Рис. 3. Типичное изменение соотношений агонистов и антагонистов (АА) и суммы АА с первого и последнего дней добровольной тренировки (Субъект № 1) . Красная, зеленая и синяя линии указывают на изменение зависимой от времени объясняющей переменной для мышц AA вокруг плечевого, плечевого, локтевого и локтевого суставов соответственно.Соотношение AA и сумма AA менялись со временем в соответствии с ритмическими движениями конечностей. Изменения в соотношении AA и сумме AA показывают, что произвольная тренировка привела к изменению контроля EP и жесткости вокруг каждого сустава.
На рисунке 4 показано изменение мышечной синергии для восьми испытуемых до и после тренировки с использованием метода, описанного в предыдущем разделе. На каждом графике левая, центральная и правая группы набора из трех полосок (красный, зеленый и синий) иллюстрируют синергию мышц в радиальном направлении [ u R ( s ) ], касательное направление [ u φ ( s )] и нулевое направление [ u R × φ ( s )] соответственно.Три цветные полосы в каждой мышечной синергии представляют значения элементов вектора мышечной синергии, и каждое значение количественно определяет вклад мышечной активности АА в движение плеча, плеча и локтя, а также локтевого сустава, соответственно. Сводку средних изменений и SD мышечной синергии см. В таблице 2. Таблица 3 иллюстрирует значения внутреннего продукта (IP) между векторами мышечной синергии, рассчитанные на основе сигналов ЭМГ в эксперименте 1, что указывает на сходство мышечной синергии в обоих интервалах. -индивидуальные и внутрииндивидуальные вариации.
Рис. 4. Синергия мышц в первый и последний дни произвольной тренировки по восьми предметам . Наборы из трех стержней представляют синергию мышц в радиальном направлении ( u R ), тангенциальном направлении ( u φ ) и нулевом направлении ( u R × φ ). Каждая цветная полоса в мышечной синергии указывает вклад мышечной активности агониста-антагониста в движение плеча (красный), плеча и локтя (зеленый) и локтевого сустава (синий).Мышечная синергия демонстрировала аналогичные паттерны в отношении как внутри-, так и межиндивидуальных вариаций во время тренировки, демонстрируя существование общих и инвариантных систем отсчета для моторной репрезентации, которые не зависят от уровня моторного обучения.
Таблица 2. Значения элементов мышечной синергии до и после произвольной тренировки по спиральной траектории (A) первый день тренировки и (B) последний день тренировки .
Таблица 3.Значения внутреннего продукта между мышечным синергизмом (эксперимент 1) .
На рисунке 5 показана типичная конечная точка жесткости до и после произвольной тренировки (первый и последний дни тренировки) для Субъекта №1. Эллипсы конечной жесткости во время движения сравнивались между соответствующими положениями рук. На рисунке 6 показаны типичные фактические и виртуальные траектории до и после добровольной тренировки для Субъекта №1. Красные и зеленые круги — это начальная и конечная точки, а стрелка указывает направление, в котором движется каждая траектория.На рис. 7 показаны фактические и виртуальные траектории в радиальном и тангенциальном направлениях, которые соответствуют траекториям на рис. 6. На рис. 7 также показано изменение времени движения, указывающее на значительное улучшение характеристик двигателя. Наблюдаемые характеристики эволюции на этих рисунках являются репрезентативными для всех восьми субъектов.
Рис. 5. Типичное изменение конечной жесткости с первого и последнего дней добровольного обучения (Тема № 1) .Хотя его размер изменился, форма и ориентация эллипса конечной жесткости не сильно изменились во время тренировки. Ориентация большой оси эллипса имела тенденцию к наклону в направлении, соединяющем плечо и конечную точку (то есть радиальное направление). Это указывает на то, что конечная жесткость в тангенциальном направлении имеет тенденцию быть намного меньше, чем в радиальном направлении.
Рисунок 6. Типичное изменение виртуальной траектории с первого и последнего дней добровольного обучения (Тема № 1) .Изменение виртуальных траекторий (синий цвет) было экстремальным по сравнению с изменением реальных траекторий (черный цвет). Виртуальные траектории были организованы из неупорядоченных паттернов в хорошо отрегулированные, но слегка искаженные спиральные паттерны, которые вращались в направлении, противоположном фактической траектории. Оценка спирального теста соответственно снизилась с 51,7 ± 20,7 до 20,9 ± 10,6, что указывает на улучшение моторных характеристик с точки зрения скорости и точности.
Рисунок 7.Эволюция реальных и виртуальных траекторий в радиальном и тангенциальном направлениях (Тема №1) . Виртуальная траектория во время быстрой спиральной трассировки для Субъекта № 1 улучшилась благодаря добровольному обучению. В частности, эволюция виртуальной траектории в тангенциальном направлении была экстремальной, и она превратилась в ритмическое движение, которое предшествовало реальной траектории, колеблющейся почти в противофазе; виртуальная траектория в радиальном направлении превратилась в траекторию, которая предшествовала реальной траектории, колеблющейся почти синфазно.Частоты колебаний виртуальной траектории в обоих направлениях стали короче, чем у реальной траектории. Эти эволюционные характеристики виртуальной траектории типичны для всех восьми субъектов.
Эксперимент 2: Синергетический анализ восстановления моторики
Показатель функциональной независимости (FIM) — это широко используемая шкала степени тяжести инвалидности, которая позволяет количественно оценить влияние нарушения на выполнение повседневной деятельности (Granger et al., 1986; Карр и Шеперд, 2010). Оценка FIM (максимальная оценка: 126) пациента, перенесшего инсульт, в этом исследовании составила 44 балла до реабилитации и 67 баллов после 2,5 месяцев реабилитации. Эти оценки показывают, что двигательная функция субъекта улучшилась благодаря упражнениям терапевта в процессе реабилитации. В соответствии с изменением оценки FIM, среднее время движения пациента, перенесшего инсульт, в нашей задаче улучшилось с примерно 6 до примерно 4 с до и после реабилитации; среднее время движения здорового испытуемого составляло около 4 с.
Поскольку у пациента, перенесшего инсульт, наблюдалось очевидное выздоровление, мы затем сравнили моторные показатели мышечной синергии, жесткости конечных точек и виртуальных траекторий, которые характеризуют координацию и регуляцию множественной мышечной активности до и после реабилитации. На рис. 8 показаны изменения соотношений AA и сумм AA для пациента, перенесшего инсульт, до и после 2,5 месяцев реабилитации, а также изменения соотношений AA и сумм AA для здорового субъекта того же поколения.На рисунке 9 показаны изменения синергии мышц, жесткости конечных точек и виртуальных траекторий, которые можно оценить с помощью предложенного алгоритма с соотношением AA и суммой AA. Фактическая траектория была также нанесена на график виртуальной траектории на Рисунке 9 как один из показателей восстановления моторики, хотя значительных изменений не наблюдалось. Подробности средних изменений и SD мышечной синергии приведены в Таблице 4. В Таблице 5 сравниваются значения IP между мышечными векторами синергии для различных вариаций в Эксперименте 2: межиндивидуальные вариации, внутрииндивидуальные вариации и вариации внутри задачи.
Рис. 8. Изменение соотношения агонист-антагонист (АК) и суммы АК для пациента, перенесшего инсульт, до и после 2,5 месяцев реабилитации . Красная, зеленая и синяя линии указывают на изменение зависимой от времени объясняющей переменной для мышц AA вокруг плечевого, плечевого, локтевого и локтевого суставов соответственно. Каждый набор данных был нормализован относительно периода времени движения. Изменения в соотношении AA и сумме AA показывают, что реабилитация привела к изменению контроля EP и жесткости вокруг каждого сустава.В частности, сумма AA была улучшена, хотя она все еще была далека от уровня, наблюдаемого у здорового человека. (Обратите внимание на разный диапазон графиков сумм AA до и после реабилитации.)
Рис. 9. Изменение синергии мышц, жесткости конечных точек и виртуальных траекторий до и после 2,5 месяцев реабилитации . Верхний, средний и нижний блоки предназначены для пациента, перенесшего инсульт, до реабилитации, после 2.5 месяцев реабилитации, и для здорового человека из того же поколения соответственно. Наборы из трех стержней представляют синергию мышц в радиальном направлении ( u R ), тангенциальном направлении ( u φ ) и нулевом направлении ( u R × φ ). Каждое число на эллипсах жесткости указывает прогресс движения во времени и соответствует каждому количеству точек на фактических и виртуальных траекториях.
Таблица 4. Значения элементов мышечной синергии для пациента, перенесшего инсульт, до и после реабилитации, а также для здорового пожилого пациента .
Таблица 5. Значения внутреннего продукта между мышечным синергизмом (эксперимент 2) .
Обсуждение
Мышечная синергия как система отсчета в мышечном пространстве
Здесь мы обсуждаем взаимосвязь между мышечным синергизмом, жесткостью конечных точек и виртуальными траекториями, уделяя особое внимание координации действий мышц АА.Насколько нам известно, мышечная синергия — это индекс координации, определяемый как функция совместной активации мышц АА. Это составной блок, связанный с механическим импедансом, а также функциональный модуль, представляющий опорную ось в полярной системе координат для смещения EP в пространстве задач. Короче говоря, мышечная синергия представляет собой систему отсчета в мышечном пространстве, которую можно использовать в моторном планировании для контроля конечных точек. Конечная жесткость — еще один показатель механического сопротивления; баланс коактивации мышц AA определяет не только синергию мышц, но также форму и ориентацию эллипса конечной точки жесткости.Виртуальная траектория — это временная последовательность EP в конечной точке. EP может быть представлен как точка в конфигурационном пространстве мышечной синергии, а виртуальная траектория может быть идентифицирована путем отслеживания точки во времени в мышечной синергии. Математические соотношения между этими двигателями между обмотками были получены из физического моделирования скелетно-мышечной структуры с несколькими мышцами АА.
Физический подход к извлечению мышечной синергии
Наш подход может открыть новую перспективу в понимании управления моторикой и обучения.Двигательные синергии обычно извлекаются путем применения статистических методов к объясняющим переменным, таким как углы суставов и сигналы ЭМГ, которые могут быть набором двигательных состояний, возникающих в результате команд ЦНС, основанных на меньшем количестве двигательных модулей. Однако результаты факторной декомпозиции не обязательно можно интерпретировать с помощью таких объясняющих переменных, даже если факторы успешно уменьшают размерность движения. Следовательно, физический смысл моторной синергии в большинстве случаев не ясен, в частности, в случае мышечной синергии, потому что ЭМГ включает информацию как о кинематических, так и о кинетических аспектах; мышцы работают как на смещение суставов, так и на сопротивление суставов.ЭМГ феноменологически интерпретируется как электрический сигнал, возникающий в результате деполяризации мышечных волокон. Однако связь между активацией мышц и движением до конца не изучена. Мы предположили, что ЦНС контролирует состояние равновесия и механический импеданс для многосуставных движений, изменяя определенные нейрофизиологические параметры (Feldman et al., 1990), и что ЭМГ, следовательно, отражает по крайней мере эти две части информации. Затем статистический анализ исходных сигналов ЭМГ может привести к выявлению временных факторов, которые обычно зависят от задачи и / или объекта.
Чтобы понять физический смысл мышечной синергии, в этом исследовании была изучена концепция AA с использованием следующих объясняющих переменных: соотношение AA, которое связано с углом равновесного сустава, и сумма AA, которая связана с жесткостью сустава. . Поскольку концепция АА происходит от управления роботизированной системой с антагонистическими пневматическими искусственными мышцами, синергия мышц, извлеченная в рамках концепции АА, имеет ясный физический смысл. Подобные идеи для управления мышцами АА можно найти в области нейробиологии [e.g., соотношение напряжений AA-мышц (Lestienne et al., 1981; Bizzi et al., 1984), механическое сопротивление и ко-активация AA-мышц (Hogan, 1984), а также контроль EP и уровня совместного сокращения для движения суставов (Feldman et al., 1990)]. Однако наша концепция АА сильно отличается от них. Концепцию АА можно рассматривать как еще одну форму гипотезы EP (Feldman, 1966, 1986; Feldman et al., 1990; Feldman and Latash, 2005) и можно распространить на новую концепцию синергии, основанной на EP (Pham et al. ., 2014; Uno et al., 2014; Hirai et al., 2015).
Также стоит отметить, что мышечная синергия, полученная из нашего подхода, состоит только из сумм AA (см. Уравнения 9a – c). Эта формулировка означает, что мышечные синергии сами по себе не являются моторными примитивами, а следствием модуляции механического сопротивления, которое может быть одним из моторных примитивов. Мы полагаем, что наши открытия согласуются с идеей динамических примитивов, которую недавно утверждали Хоган и Стернад (Hogan and Sternad, 2012).Тем не менее, синергия мышц может играть роль функциональных модулей — то есть системы отсчета в мышечном пространстве. Мышечная синергия, представленная как баланс механического сопротивления, может быть названа «кинетической синергетикой». Таким образом, наше исследование классифицируется как подход, основанный на физике, и явно отличается от большинства исследований, которые относятся к категории статистических подходов (d’Avella et al., 2006; Cheung et al., 2009, 2012; Dominici et al. ., 2011; Bizzi, Cheung, 2013; Roh et al., 2013) для извлечения синергии мышц.Хотя в этой статье мы не обсуждаем нулевую синергию, идея нулевой синергии, которую статистический подход не может извлечь из данных, является информативной. Подход, основанный на физике, представляет собой мощный способ реконструировать механизм управления, лежащий в основе нейромышечно-скелетной системы в динамической среде. Для получения более подробной информации о мышечной синергии, основанной на концепции АА, обратитесь также к нашим недавним публикациям (Koba et al., 2014; Oku et al., 2014, 2015; Uno et al., 2014).
Синергия мышц, жесткость конечных точек и виртуальные траектории в моторной адаптации
Как синергия мышц или баланс механического сопротивления влияют на развитие моторики, если они представляют собой систему отсчета в мышечном пространстве? Мы измерили сходство векторов мышечной синергии среди субъектов до и после произвольной тренировки на основе значения IP соответствующих двух векторов мышечной синергии (таблица 3).Результаты показали, что мышечная синергия до и после тренировки демонстрировала сходные модели в отношении как внутрииндивидуальных, так и межиндивидуальных вариаций. Также примечательно, что синергия мышц оставалась почти постоянной, несмотря на то, что она рассчитывалась на основе изменяющихся во времени сумм AA. Стандартные значения мышечной синергии были достаточно малы для всех испытуемых (рисунок 4, таблица 2). Эти результаты демонстрируют неизменные кинетические характеристики, которые ЦНС может использовать для планирования движения.
Математически очевидно, что синергия мышц представляет собой основы полярных координат. Результаты показывают, что инвариантная система отсчета для моторного представления закодирована в изменяющиеся во времени биологические сигналы (рис. 3) и что система отсчета не только обычна среди нормальных субъектов, но и не зависит от уровня обучения. Таким образом, мы предполагаем, что мышечные синергии могут быть функциональными модулями, связывающими мышечное пространство с пространством задач, и что они могут быть системой координат для управления моторикой.Более того, неизменность мышечной синергии может быть связана со стабильными характеристиками конечной жесткости, поскольку мышечная синергия представляет собой баланс механического сопротивления за счет совместной активации мышц AA. В нашей задаче форма и ориентация эллипса конечной жесткости не сильно менялись во время обучения; однако его размер изменился (рис. 5). Ориентация большой оси эллипса имела тенденцию к сохранению наклона в направлении, соединяющем плечо и конечную точку (т.е., радиальное направление). Это указывает на то, что конечная жесткость в тангенциальном направлении всегда имеет тенденцию быть намного меньше, чем в радиальном направлении.
В отличие от этих жестко запрограммированных характеристик ЦНС, виртуальные траектории резко изменились с усилением моторики. Виртуальные траектории были организованы из неупорядоченных узоров в гладкие спиральные узоры, которые вращались в направлении, противоположном фактическим траекториям (рис. 6). Как показано на рисунке 7, в обоих случаях до и после тренировки виртуальные траектории демонстрировали колебательные движения, которые предшествовали реальным траекториям с аналогичными последовательностями, показывающими постепенно уменьшающиеся амплитуды.Однако разные фазовые отношения между фактическими и виртуальными траекториями проявились в каждом направлении после тренировки. В радиальном направлении высокая жесткость конечной точки вызвала движение конечной точки EP с фазовым сдвигом примерно на 0 °. В тангенциальном направлении гораздо меньшая жесткость конечной точки вызвала движение конечной точки EP с фазовым сдвигом примерно на 180 °. Связь этих направленных механических сопротивлений привела к противоречивому наблюдению, т. Е. К противоположному вращению виртуальных траекторий.Это явление можно наблюдать при быстрых движениях. Это открытие указывает на то, что ЦНС требуется внутренняя модель (Gomi and Kawato, 1997) для достижения динамической компенсации в процессе моторного контроля и обучения.
Синергия мышц, жесткость конечных точек и виртуальные траектории при восстановлении моторики
В отличие от наших результатов из эксперимента 1, значительные изменения (IP <0,9) наблюдались в мышечной синергии у пациентов, перенесших инсульт, до и после реабилитации (таблица 5).Это наблюдение относится к нарушенной межсуставной координации, обычно наблюдаемой при движениях рук после инсульта. На наш взгляд, изменение мышечной синергии указывает на нарушение основы моторного контроля и может влиять на систему отсчета, необходимую для сенсомоторной трансформации. В случае пациента, перенесшего инсульт, аномальная совместная активация двухсуставных АА-мышц (зеленые столбцы на рисунке 9) привела к различным синергическим эффектам в мышцах, особенно в тангенциальном направлении. Значения SD аномальной мышечной синергии были тогда в пределах допустимого (малого) уровня, и, таким образом, аномальная мышечная синергия также могла рассматриваться как инвариантная основа для полярных координат.Другими словами, система отсчета в мышечном пространстве поддерживалась другими скоординированными мышцами.
До реабилитации субъект, перенесший инсульт, мог использовать моторную избыточность для регулирования нескольких мышц, чтобы управлять своими нарушениями после неврологической травмы, и поэтому он, возможно, достиг инвариантной координации, отличной от таковой у нормальных субъектов. Поскольку мышечная синергия представляла собой баланс механического сопротивления за счет совместной активации мышц AA, изменения мышечной синергии значительно повлияли на характеристики конечной точки жесткости.Эллипс конечной точки жесткости пациента после инсульта до реабилитации был удлинен, а ориентация его большой оси указала на большее вращение по часовой стрелке, чем наблюдаемое у здорового субъекта. Основная причина могла быть в гипертонусе двусуставных мышц; увеличение совместной активации двухсуставных мышц ( s se ) имеет тенденцию изменять собственные значения и собственные векторы матрицы жесткости суставов K j ( s ), увеличивая эллипса жесткости и вращая его большую ось по часовой стрелке.Эти характеристики эллипса конечной точки жесткости могут объяснить типичные дисфункции: синергию сгибателей (характеризующуюся одновременным отведением плеча и сгибанием локтя) и синергией разгибателей (характеризующейся одновременным приведением плеча и разгибанием локтя) (Brunnstrom, 1970). Более того, изменение мышечной синергии приводит к значительному искажению не только жесткости конечных точек, но и сопутствующих виртуальных траекторий. Виртуальная траектория перемещалась в ограниченном диапазоне и имела тенденцию двигаться в фиксированном направлении малой оси эллипса конечной жесткости.
Однако реабилитация вызвала фундаментальные изменения в двигательном контроле у пациента, перенесшего инсульт. Мышечная синергия после реабилитации показала те же модели (IP> 0,9), что и у здорового субъекта (таблица 5). Этот результат указывает на то, что субъект, перенесший инсульт, восстановил нормальную структуру мышечной синергии в процессе выздоровления. Более того, эти паттерны были похожи на паттерны, извлеченные из испытуемых во время задачи быстрого поиска по спирали (IP> 0,9).Это тематическое исследование предоставляет только предварительные доказательства общей синергии мышц при выполнении различных задач, разных предметов и различных двигательных навыков испытуемых. Конечная жесткость также восстановилась, наряду с восстановлением соответствующей мышечной синергии. Форма эллипса конечной жесткости была укорочена, а ориентация большой оси слегка повернута против часовой стрелки. Эти результаты свидетельствуют о том, что пациент, перенесший инсульт, выздоравливал.Этот анализ был основан на данных после 2,5 месяцев реабилитации, и предполагается, что у пациента, перенесшего инсульт, есть потенциал для восстановления двигательной функции при дальнейшей реабилитации. Интересно, что в процессе восстановления мышечная синергия восстановила нормальные паттерны раньше, чем виртуальные траектории. Виртуальная траектория полностью не восстановилась после 2,5 месяцев реабилитации. Это указывает на то, что синергия мышц, играющая роль системы отсчета в мышечном пространстве, имеет фундаментальное значение для моторного контроля.Это разумный вывод, потому что виртуальные траектории определяются конфигурационным пространством мышечной синергии.
Перспективы реабилитации электродвигателей
Нарушение координации внутри конечностей — одна из причин двигательной недостаточности. Если наша гипотеза верна, то при выборе методов реабилитации следует тщательно учитывать мышечную синергию (т.е. баланс механического сопротивления). Важность контроля импеданса обсуждалась часто, но при его применении требуется осторожность, потому что контроль импеданса может привести либо к улучшению, либо к ухудшению результатов в зависимости от способа его использования.Мышечная синергия может быть показателем для изучения соответствующего вспомогательного применения контроля импеданса. Это также обеспечило бы дополнительную меру клинической оценки, такой как оценка Фугля-Мейера и другие. Опять же, наша гипотеза состоит в том, что синергия мышц, баланс механического сопротивления, представляют собой систему отсчета в мышечном пространстве. Это исследование проверило нашу гипотезу, чтобы подтвердить возможность практического использования мышечной синергии, например, при оценке, диагностике и планировании вмешательства для реабилитации после инсульта.
Результаты этого исследования можно резюмировать следующим образом: (1) мышечная синергия — это неизменный баланс механического сопротивления мышц; (2) мышечная синергия представляет собой систему отсчета в мышечном пространстве; и (3) общие мышечные синергии были обнаружены между различными задачами (быстрое рисование спирали с не доминирующей рукой и медленное рисование круга с доминирующей рукой), разных субъектов из разных поколений (т. От 20 до 70 лет) и разные уровни двигательных навыков (начинающий, опытный и у пациента после реабилитации).Дальнейший сбор и анализ данных из различных ситуаций укрепят нашу гипотезу; Было бы полезно обсудить взаимосвязь с другими внутренними репрезентациями, такими как системы отсчета, центрированные на глазах, головы и мира. Наша будущая работа включает разработку новых подходов к роботизированной терапии, особенно для нижних конечностей. Робототерапия, особенно для функции нижних конечностей, в настоящее время находится на ранней стадии развития. Следующее поколение нейрореабилитации с помощью роботов требует правильной оценки эффекта вмешательства и сбора клинических данных для разработки эффективного вмешательства.Реабилитация после инсульта требует сенсомоторной координации. Объединив методы оценки синергии и роботизированной терапии , мы разработаем новое роботизированное вмешательство, протестируем и подтвердим его в рамках мышечной синергии.
В заключение, это исследование показало доказательства того, что мышечная синергия играет центральную роль в моторном представлении и формировании внутренней модели. Синергия мышц — это не примитивы, а функциональные модули механического сопротивления.Баланс механического сопротивления мышц важен для управления моторикой, обучения и восстановления.
Заявление о конфликте интересов
Авторы заявляют, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могут быть истолкованы как потенциальный конфликт интересов.
Благодарности
Мы хотели бы поблагодарить докторов наук. Невиллу Хогану и Дагмар Стернад за ценные комментарии к нашему исследованию. Эта работа была поддержана грантом JSPS для научных исследований (KAKENHI), номера грантов 24360096 и 15H03949.HK была частично поддержана грантом NIH R01HD069776-03.
Список литературы
Арига Ю., Фам Х., Уэмура М., Хираи Х. и Миядзаки Ф. (2012). «Новый контроль точки равновесия системы агонист-антагонист с помощью пневматических искусственных мышц», в IEEE Int. Конф. Робот. Автомат. (ICRA2012) . (Сент-Пол: IEEE), 1470–1475.
Google Scholar
Бернштейн, Н. (1967). Согласование и регулирование движений .Оксфорд: Pergamon Press.
Google Scholar
Бицци, Э., Аккорнеро, Н., Чаппл, В., и Хоган, Н. (1984). Контроль осанки и формирование траектории движения рук. J. Neurosci. 4, 2738–2744.
PubMed Аннотация | Google Scholar
Бицци, Э., и Чунг, В. К. К. (2013). Нервное происхождение мышечной синергии. Фронт. Comput. Neurosci. 7:51. DOI: 10.3389 / fncom.2013.00051
CrossRef Полный текст | Google Scholar
Бруннстрем, С.(1970). Движение терапия при гемиплегии: нейрофизиологический подход . Нью-Йорк, штат Нью-Йорк: Харпер и Роу.
Google Scholar
Карр Дж. И Шеперд Р. Б. (2010). Неврологическая реабилитация . Лондон: Черчилль Ливингстон.
Google Scholar
Cheung, V.C.K, Piron, L., Agostini, M., Silvoni, S., Turolla, A., and Bizzi, E. (2009). Устойчивость мышечной синергии к произвольным действиям после коркового инсульта у человека. Proc. Natl. Акад. Sci. США, 106, 19563–19568. DOI: 10.1073 / pnas.0
4106PubMed Аннотация | CrossRef Полный текст | Google Scholar
Cheung, V.C.K, Turolla, A., Agostini, M., Silvoni, S., Bemmis, C., Kasi, P., et al. (2012). Паттерны мышечной синергии как физиологические маркеры моторного коркового повреждения. Proc. Natl. Акад. Sci. США 109, 14652–14656. DOI: 10.1073 / pnas.1212056109
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Крисвелл, Э.(2010). Введение Крэма в поверхностную электромиографию , 2-е изд. Садбери: издательство «Джонс и Бартлетт».
Google Scholar
d’Avella, A., Portone, A., Fernandez, L., and Lacquaniti, F. (2006). Контроль быстродействующих движений с помощью комбинаций мышечной синергии. J. Neurosci. 26, 7791–7810. DOI: 10.1523 / JNEUROSCI.0830-06.2006
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Dominici, N., Иваненко, Ю.П., Каппеллини, Г., д’Авелла, А., Монди, В., Чикезе, М., и др. (2011). Двигательные примитивы у новорожденных и их развитие. Наука 334, 997–999. DOI: 10.1126 / science.1210617
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Фельдман А.Г. (1966). Функциональная настройка нервной системы с контролем движений или поддержанием устойчивой позы. II. Контролируемые параметры мышцы. Биофизика 11, 565–578.
Google Scholar
Фельдман А.Г. (1986). Еще раз о гипотезе точки равновесия (λ-модель) для управления двигателем. J. Mot. Behav. 18, 17–54. DOI: 10.1080 / 00222895.1986.10735369
CrossRef Полный текст | Google Scholar
Фельдман, А. Г., Адамович, С. В., Остри, Д. Дж., И Фланаган, Дж. Р. (1990). «Происхождение электромиограмм — объяснения, основанные на гипотезе точки равновесия», в Multiple Muscle Systems , ред. J.М. Винтерс и С.Л.-Й. Ву (Нью-Йорк, штат Нью-Йорк: Спрингер), 195–213.
Google Scholar
Фельдман А. Г. и Латаш М. Л. (2005). Проверка гипотез и развитие науки: недавние попытки опровергнуть гипотезу точки равновесия. Exp. Brain Res. 161, 91–103. DOI: 10.1007 / s00221-004-2049-0
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Флэш, Т., и Хоган, Н. (1985). Координация движений рук: экспериментально подтвержденная математическая модель. J. Neurosci. 5, 1688–1703.
PubMed Аннотация | Google Scholar
Грейнджер, К. В., Гамильтон, Б. Б., Кейт, Р. А., Зилезны, М., и Шервин, Ф. С. (1986). Достижения в функциональной оценке для медицинской реабилитации. Верх. Гериатр. Rehabil. 1, 59–74. DOI: 10.1097 / 00013614-198604000-00007
CrossRef Полный текст | Google Scholar
Хираи, Х., Фам, Х., Арига, Ю., Уно, К., и Миядзаки, Ф. (2015).»Глава. 2: моторный контроль, основанный на гипотезе мышечной синергии », в Когнитивная неврология Робототехника: синтетические подходы к человеческому пониманию, том I: синтетические подходы, часть I (Springer).
Google Scholar
Хислоп Х. и Монтгомери Дж. (2007). Тестирование мышц Дэниэлса и Уортингема: методы ручного обследования , 8-е изд. Сент-Луис: W.B. Компания Сондерс.
Google Scholar
Хоган, Н.(1984). Адаптивный контроль механического сопротивления путем коактивации мышц-агонистов. IEEE Trans. Автомат. Contr. 29, 681–690. DOI: 10.1109 / TAC.1984.1103644
CrossRef Полный текст | Google Scholar
Хоган, Н., Стернад, Д. (2012). Динамические примитивы двигательного поведения. Biol. Киберн. 106, 727–739. DOI: 10.1007 / s00422-012-0527-1
CrossRef Полный текст | Google Scholar
Кандел, Э., Шварц, Дж., Джесселл, Т., Сигельбаум, С.А., и Хадспет, А.Дж. (2012). Принципы нейронологии , 5-е изд. Нью-Йорк: McGraw-Hill Professional.
Google Scholar
Коба К., Мураками К., Оку Т., Уно К., Фативуттипат П., Ямасита Ю. и др. (2014). «Неявное представление мышечной активности во время тренировки координации: анализ мышечной синергии для визуализации моторного усиления в виртуальной траектории движения многосуставной руки», в 5-м IEEE RAS & EMBS Int.Конф. Биомед. Роб. Биомехатрон. (БиоРоб 2014) . (Сан-Паулу: IEEE), 270–275.
Google Scholar
Lacquaniti, F., Terzuolo, C., and Viviani, P. (1983). Закон, связывающий кинематический и фигуральный аспекты движений рисования. Acta Psychol. 54, 115–130. DOI: 10.1016 / 0001-6918 (83)
-6CrossRef Полный текст | Google Scholar
Латаш, М. Л. (2008). Синергия . Нью-Йорк: Издательство Оксфордского университета.
Google Scholar
Лестьен, Ф., Полит, А., и Бицци, Э. (1981). Функциональная организация двигательного процесса, лежащего в основе перехода от движения к позе. Brain Res. 230, 121–131. DOI: 10.1016 / 0006-8993 (81) -6
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Мицуда, Т., Мару, Н., Фудзикава, К., и Миядзаки, Ф. (1997). Бинокулярное визуальное сервоуправление на основе линейного инвариантного во времени отображения. Adv. Робот. 11, 429–443. DOI: 10.1163 / 156855397X00146
CrossRef Полный текст | Google Scholar
Мусса-Ивальди, Ф. А., Хоган, Н., и Бицци, Э. (1985). Нервные, механические и геометрические факторы, влияющие на положение рук у людей. J. Neurosci. 5, 2732–2743.
PubMed Аннотация | Google Scholar
Оку Т., Уно К., Ниси Т., Кагеяма М., Коба К., Уэмура М. и др. (2015). «Технико-экономическое обоснование для оценки координации внутри конечностей при реабилитации после инсульта: два индекса механического сопротивления путем коактивации мышц-агонистов», в 14th IEEE / RAS-EMBS Int.Конф. Rehabil. Робот. (ICORR2015) . (Сингапур: IEEE), 899–904.
Google Scholar
Оку, Т., Уно, К., Ниши, Т., Кагеяма, М., Фативуттипат, П., Коба, К. и др. (2014). «Пилотное исследование количественной оценки мышечного дисбаланса: различия в синергии мышц, траектории точки равновесия и жесткость конечной точки при нормальных и патологических движениях верхних конечностей», в 36th Ann. Int. Конф. IEEE Eng. Med. Биол. Soc. (EMBC 2014) . (Чикаго: IEEE), 5784–5787.
Google Scholar
Перотто А. О. (2011). Анатомическое руководство для электромиографа: конечности и туловище , 5-е изд. Спрингфилд: Charles C Thomas Publisher Ltd.
Google Scholar
Pham, H. T. T., Ariga, Y., Tominaga, K., Oku, T., Nakayama, K., Uemura, M., et al. (2014). Извлечение и реализация мышечной синергии в нейромеханическом управлении движением верхних конечностей. Adv. Робот. 28, 745–757.DOI: 10.1080 / 01691864.2013.876940
CrossRef Полный текст | Google Scholar
Ро, Дж., Раймер, В. З., Перро, Э. Дж., Ю, С. Б., и Бир, Р. Ф. (2013). Изменения синергетической структуры мышц верхних конечностей у лиц, переживших хронический инсульт. J. Neurophysiol. 109, 768–781. DOI: 10.1152 / jn.00670.2012
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Шадмер Р. и Мусса-Ивальди Ф. А. (1994). Адаптивное представление динамики при обучении двигательной задаче. J. Neurosci. 14, 3208–3224.
PubMed Аннотация | Google Scholar
Уно, К., Оку, Т., Фативуттипат, П., Коба, К., Ямасита, Ю., Мураками, К. и др. (2014). «Новый метод экстракции мышечной синергии для объяснения траектории точки равновесия и жесткости конечной точки во время движений верхней конечности человека в горизонтальной плоскости», в 5th IEEE RAS & EMBS Int. Конф. Биомед. Робот. Биомехатрон. (БиоРоб2014) . (Сан-Паулу: IEEE), 621–626.
Google Scholar
Verkerk, P.H., Schouten, J.P., и Oosterhuis, H.J. (1990). Измерение координации рук. Clin. Neurol. Нейрохирургия. 92, 105–109. DOI: 10.1016 / 0303-8467 (90)
-I
CrossRef Полный текст | Google Scholar
Зациорский В. М., Прилуцкий Б. И. (2012). Биомеханика скелетных мышц . Шампанское: Human Kinetics.
Google Scholar
Как использовать мышцы-агонисты и антагонисты в спорте на выносливость
То, с чем мы, как спортсмены, работающие на выносливость, возможно, не слишком хорошо знакомы, — это мышечная структура тела, в частности, мышцы-агонисты и антагонисты.Цель этого блога — дать вам лучшее представление о том, как работает ваше тело во время тренировок, и показать вам, как сделать тренировки более эффективными.
В этом блоге освещено:
- Что такое мышцы-агонисты и антагонисты
- Популярные упражнения в качестве примеров
- Почему важны мышцы-агонисты и антагонисты
- Как тренировать мышцы-антагонисты
- Пример нижней части корпуса
- Пример верхней части
Что такое мышцы-агонисты и антагонисты
Агонист и антагонист — это названия каждой мышцы, имеющей две рабочие области.На примере ног: передняя часть ноги имеет четырехглавую мышцу, а задняя часть ноги — подколенное сухожилие. Под агонистом и антагонистом понимается, что один из них является первичным двигателем, а другой — вторичной мышцей во время определенного движения.
Например, при выполнении такого упражнения, как езда на велосипеде, мы проводим большую часть времени, толкаясь, поэтому наши квадрицепсы горят, когда мы поднимаемся / бегаем / устаем. Это делает четырехглавую мышцу агонистом, поскольку она является основной мышцей, а подколенные сухожилия становятся здесь антагонистом, поскольку они не являются основным двигателем.
Если велосипедист едет зажатым, подколенные сухожилия будут создавать больше силы, когда вы тянете, а также нажимаете на педали, но они далеко не так сильны, как квадрицепсы.
Популярные упражнения в качестве примеров
(агонист зеленый, антагонист красный)
Велоспорт: Квадрицепсы, подколенные сухожилия, икры
Приседания: Квадрицепсы, ягодицы, подколенные сухожилия, поясница
Становая тяга: Спина, ягодицы, подколенные сухожилия, квадрицепсы
Жим лежа: Грудные мышцы (грудь), трицепсы, широчайшие (спина), бицепсы
Подтягивания: широчайшие (спина), бицепсы, трицепсы, плечи
По сути, при большом количестве движений это разрушает мышцы на противоположной стороне от работающих, но почему это важно?
Почему мышцы-агонисты и антагонисты важны
Понимание этого важно по двум причинам:
- Это может сделать ваши тренировки намного более эффективными, если вы поймете, как работает ваше тело, и мышцы, участвующие в улучшении ваших результатов при езде на велосипеде.
- Это может снизить риск получения травмы во время соревнований или тренировок.
Это может показаться очевидным, но понимание того, как на самом деле работает ваше тело, имеет огромное значение для ваших тренировок.Не только с точки зрения эффективности, но и с точки зрения снижения риска травм. В качестве примера подумайте о бегунах: я уверен, что в какой-то момент вы увидите, как бегун / футболист / спринтер тянет или разрывает подколенное сухожилие, когда они сжимают его и падают на пол.
Когда это произойдет, вы заметите одно обычное событие; это всегда на этапе спринта, когда спортсмен снова опускает ногу на пол. Почему это?
Обычно это происходит из-за того, что подколенное сухожилие недостаточно сильное, чтобы выдержать быстрое разгибание, обычно из-за того, что им пренебрегают во время тренировки.Это также может случиться с велосипедистами, нажимающими на педали, помните, что фаза удлинения происходит, когда велосипедист нажимает на шатун.
Затем, с точки зрения производительности, вспомните мой комментарий о том, что когда велосипедист защелкивается, он подсознательно тянет подколенные сухожилия на педали. Таким образом, тренировка мышц-антагонистов может существенно повлиять на работоспособность и предотвратить травмы.
Как тренировать мышцы-антагонисты
Ответ на этот вопрос может зависеть от того, сколько времени вы проводите в тренажерном зале.Если вы можете проводить только одно занятие в неделю, ваш план будет совсем другим для человека, который может тренироваться три раза в неделю.
По сути, вы хотите тренировать мышцы-антагонисты в два раза больше, чем мышцы-агонисты.
Пример нижней части корпуса
Возвращаемся к приседанию. Агонистами являются четырехглавые мышцы и ягодицы, а антагонистами — подколенные сухожилия, нижняя часть спины.
Если в вашем плане есть приседания, я бы тогда включил упражнение на подколенное сухожилие, такое как становая тяга с жесткими ногами, скандинавские сгибания или тренажер для сгибания подколенных сухожилий.В отношении подколенных сухожилий есть научные исследования, которые показывают, что они лучше реагируют на эксцентрические упражнения (удлинение) , поэтому первые два упражнения, которые я упомянул, были бы более эффективными.
Соотношение 2: 1 позволит вам проработать мышцы, которые обычно не задействуются во время тренировки.
Помните, что вы часто используете квадрицепсы. При езде на велосипеде, беге, ходьбе, даже когда вы садитесь со стула и выходите из машины. Они не требуют такой сильной стимуляции, чтобы стать сильнее, чем мышцы вашего тела, которые не используются так часто.
Я бы также использовал этот метод для верхней части тела. Особенно в таком виде спорта, как езда на велосипеде, когда мы проводим так много времени, сгорбившись. Соблюдение этого соотношения 2: 1 позволит нам развить мышцы, на которые мы рассчитываем, чтобы поддерживать здоровую осанку. Мышцы, которые, как и подколенные сухожилия, редко используются в повседневной жизни, связанной с офисной работой, спортом и всем остальным.
Пример верхней части корпуса
Основная мышца, используемая в жиме лежа, — это грудь, при этом трицепс также выполняет некоторую работу, чтобы оттолкнуть штангу от груди.Антагонистами здесь являются бицепсы и мышцы спины, которые работают, чтобы стабилизировать вас. Если в вашем плане есть жим лежа, я бы добавил несколько упражнений, которые сосредоточены на мышцах верхней части спины, а также на бицепсах.
Например, такие упражнения, как подтягивание лица, тяга сидя, тяга штанги, тяга широчайших вниз и обратная муха гантелей — все это отличные способы развития мышц-антагонистов. Это снизит риск неправильной осанки, а также улучшит ваше дыхание в условиях стресса, поскольку ваше тело более способно удерживать сильную позицию.
Сводка
Когда дело доходит до понимания того, как тренироваться, вы должны понимать, как функционирует ваше тело. Я надеюсь, что этот блог помог вам каким-то образом развить это понимание и что вы можете использовать его для улучшения своих упражнений, здоровья и скорости на велосипеде.
Что такое группа мышц-антагонистов для разгибания спины?
При разгибании спины используются мышцы, выпрямляющие позвоночник, и многораздельные мышцы.
Изображение предоставлено: jacoblund / iStock / Getty Images
Это маленькое чудо, что человеческое тело настолько хорошо скоординировано, что все его примерно 650 мышц работают в гармонии, заставляя вас двигаться.У каждой группы мышц есть противоположная группа мышц, которая держит ее под контролем. Когда ваши мышцы двигают ваше тело определенным образом, мышцы, производящие движение, становятся агонистами. Противодействующие движению мышцы становятся антагонистами.
В движении, таком как разгибание спины, мышцы, разгибающие спину, являются агонистом. Мышцы, производящие противоположное движение, то есть сгибание спины, — это брюшной пресс. Эти две группы мышц важны, потому что они стабилизируют позвоночник.Им необходимо сохранять равновесие, чтобы ваш позвоночник оставался стабильным и здоровым.
Подробнее: Цель упражнения на разгибание спины
Мышцы для разгибания спины
Разгибание спины немного сложнее, чем сгибание бицепса, потому что задействовано больше мышц и больше участков тела. Во время разгибания спины вы сокращаете мышцы-разгибатели спины, такие как многораздельные и выпрямляющие позвоночник. Эти мышцы проходят вдоль позвоночника от основания к черепу.Они расширяют позвоночник, сгибая его назад. При разгибании спины эти мышцы являются агонистом.
Мышцы-антагонисты
На противоположной стороне тела от мультифидуса и мышцы, выпрямляющей позвоночник, находятся мышцы живота. Самая известная мышца живота — это прямая мышца живота, это мышца, которую вы видите, когда у кого-то есть «шесть кубиков». Эта мышца проходит от основания ребер вниз к передней части таза. Он действует, чтобы согнуть позвоночник, что является противоположным движению мышц-разгибателей спины.
Не только прямая мышца живота пытается согнуть позвоночник. Также ему помогают внешние косые мышцы живота и поперечная мышца живота. Наружные косые мышцы живота — это мышцы живота по бокам туловища. Эти мышцы проходят снизу и по бокам ребер в таз.
Поперечная мышца живота — самая глубокая мышца живота. Он покрывает большую площадь от нижней части грудины до таза и обратно по бокам бедер.Прямая мышца живота, внешняя косая мышца и поперечная мышца живота сгибают спину, делая их антагонистами по отношению к мышцам-разгибателям спины.
Только эти три мышцы живота образуют группу антагонистов разгибания спины, за исключением четвертой мышцы живота: внутренней косой мышцы живота. Эта мышца зажата между внешней косой мышцей живота и поперечной мышцей живота и используется для вращения, но не для сгибания позвоночника.
Прямая мышца живота — самая заметная мышца живота.
Изображение предоставлено: antondotsenko / iStock / Getty Images
Агонист против. Антагонист
Наличие двух противоположных групп мышц очень важно, потому что одна может держать другую под контролем. При разгибании спины брюшной пресс контролирует мышцы нижней и средней части спины. Если вы выполните разгибание спины как можно быстрее без веса, ваш позвоночник будет двигаться невероятно быстро.
Работа антагониста, брюшного пресса, состоит в том, чтобы замедлить и остановить позвоночник, если он движется слишком быстро или слишком далеко назад.Важно, чтобы вы не нарушали баланс между мышцами-агонистами и антагонистами, постоянно работая с одной стороной и оставляя другую в покое. Это может создать дисбаланс в осанке, что может привести к проблемам со спиной.
Взаимное торможение
Было бы катастрофой, если бы мышцы-агонисты и антагонисты сокращались одновременно. Вы бы замерзли, не в силах пошевелиться! К счастью, у нервной системы есть решение. Взаимное торможение поддерживает плавное движение тела, заставляя антагониста расслабляться, когда агонист сокращается.
При разгибании спины, когда позвоночник начинает расширяться, нервная система по существу приказывает брюшному прессу расслабиться. Это позволяет мышцам разгибания спины плавно поднимать позвоночник. Перед нервной системой стоит сложная задача — решить, когда снова включить антагониста, чтобы он остановился или замедлил движение.
Подробнее: Какие примеры упражнений для антагонистических мышц?
Пара антагонистов — Myopress
Поскольку это короткая неделя из-за Дня Благодарения, я сделаю ее короткой и приятной.
Знаете ли вы, что мышечная система вашего тела действует как инь и янь? Определенные области мышц вашего тела имеют прямую противоположность и в результате дополняют друг друга. Довольно удивительный материал, правда? Определенно! В вашем теле много всего происходит.
Вы когда-нибудь слышали слово антагонист? У вас есть краткое воспоминание о вашем классе английского языка в старшей школе, не так ли? Термин антагонист может относиться к типу мышц вашего тела. Вы знакомы с термином «главный герой» со школы, но когда речь идет о ваших мышцах, его называют «агонист».Что ж, точно так же, как главные герои и антагонисты в литературе противостоят друг другу, мышцы-агонисты и антагонисты выполняют определенную функцию, и из-за отсутствия лучшего термина также противостоят друг другу. Много лет назад, когда я начал заниматься нервно-мышечной терапией, я узнал все о мышцах вашего тела и о том, что заставляет их работать. По сути, мышцы-агонисты помогают двигаться конечности, а мышцы-антагонисты помогают вернуть конечность в исходное положение.
Антагонист и агонист обычно называют парами антагонистов.Мышцы-агонисты — это работающие мышцы, которые обычно считаются «первичными двигателями», поскольку они обычно производят определенное движение. Его противоположность, мышца-антагонист — это мышца «возвращающего». Агонист и антагонист работают парами, когда один сокращается, другой расслабляется. Бицепс и трицепс — наиболее известный набор мышц-антагонистов. Другие пары антагонистов включают, помимо прочего, верхнюю часть спины и грудь, квадрицепсы и подколенные сухожилия.
Как все это влияет на меня, спросите вы? Что ж, важно немного знать о том, как работают ваши мышцы, когда вы думаете о собственных планах лечения и о том, как лучше справиться с болью.Все дело в синергии, создаваемой движением этих групп мышц. Все они работают вместе, чтобы обеспечить нормальное функционирование.
До следующего раза… Позаботьтесь о своих мышцах, и они позаботятся о вас!
Желаю хорошо провести время!
Ура
Мышечный дисбаланс (и как они могут вызывать боль / дисфункцию)
Что такое мышечный дисбаланс?
Мышечный дисбаланс можно описать как неравенство в распределении сил между мышцами-агонистами и антагонистами сустава.Другими словами, мышцы, действующие на сустав в одном направлении, тянут сильнее, чем мышцы, действующие на сустав в противоположном направлении. Это может негативно повлиять на работу сустава.
Как возникает мышечный дисбаланс?
Существует несколько способов нарушения соотношения сил между мышцами-агонистами и антагонистами, что приводит к мышечному дисбалансу, включая следующие:
- Плохая осанка
- Напр. длительные периоды сгорбления над компьютером
- Неправильное обучение
- Напр.слишком много внимания уделяется тренировке мышц-агонистов, а не мышц-антагонистов
- Травма / заболевание
- Напр. теннисный локоть, растяжение мышц, рассеянный склероз, инсульт
Положение головы вперед и округленные плечи вперед — очень распространенные примеры неправильной осанки. Во многом это можно отнести к все более оседлому образу жизни, который многие люди принимают в нашем обществе. Все сводится к тому простому факту, что многие из нас будут проводить часы каждый день перед компьютером, телевизором, учебником, мобильным телефоном, планшетом, рулевым колесом и многими другими объектами и задачами, в которых мы часто оказываемся очень передовыми. закругленные позиции.
В конце концов, подобные плохие постуральные привычки могут привести к мышечному дисбалансу, потому что мышцы-агонисты, которые постоянно укорачиваются, начнут дезадаптировать к положению за счет сжатия, тогда как мышцы-антагонисты начнут ослабевать из-за частой недостаточной нагрузки и в удлиненном состоянии. . Эти негативные мышечные изменения, вызванные плохой осанкой, затем приводят к округленному положению вперед, которое сохраняется даже тогда, когда вы не участвуете в этих усиливающих его действиях.Ниже приведены некоторые мышцы и группы мышц, которые будут затронуты в этом примере:
- Агонисты
- Напр. подтяжка большой и малой грудных мышц, верхней трапеции, поднимающей лопатки
- Антагонисты
- Напр. ослабление средних и нижних трапеций, ромбовидных, глубоких шейных сгибателей
Как дисбаланс мышц вызывает боль и дисфункцию?
Независимо от того, привела ли к дисбалансу мышц неправильная осанка, скорее всего, это станет результатом, если проблема не будет решена (опять же, из-за постепенно ухудшающегося натяжения сустава в одном направлении).Постепенное снижение подвижности и гибкости может в конечном итоге принять форму, поскольку некоторые движения будут ограничены мышечной слабостью, а другие — напряжением мышц.
Приведу более подробный пример: в нашем случае положения головы вперед, одна серьезная проблема заключается в том, что на каждый дюйм, на который голова смещается вперед от своего нормального нейтрального положения, она ощущается на десять фунтов тяжелее. Конечно, это означает, что на те структуры шеи, которые поддерживают голову, ложится значительная дополнительная работа.Это не только может привести к раздражению мышц шеи и других структур, которые чрезмерно работают, но также значительно увеличивает риск более серьезных проблем в будущем, таких как остеохондроз.
Как исправить мышечный дисбаланс?
Предполагая, что ваш мышечный дисбаланс возник из-за неправильной осанки, неправильной тренировки или травмы, которая с тех пор была решена, исправление включает в себя устранение проблем, которые к нему привели. Подтянувшиеся мышцы нужно растягивать, а ослабленные — укреплять.В то же время необходимо восстановить правильную осанку. Если дисбаланс является результатом неправильных тренировок в тренажерном зале, дополнительная рекомендация будет заключаться в разработке нового распорядка, который включает хорошее распределение упражнений по всем группам мышц после устранения дисбаланса.
Конечно, некоторые из этих предложений легче сказать, чем сделать, особенно если недостаток подвижности или чрезмерная боль мешают вам выполнять определенные упражнения или растяжки, которые, по вашему мнению, могут помочь.К счастью, есть много профессионалов, которые могут помочь с восстановлением подвижности, облегчением боли, разработкой программ тренировок и обучением осанке и упражнениям. Не бойтесь обращаться за помощью к врачу, кинезиологу, физиотерапевту, мануальному терапевту или любому другому специалисту в области кинезиологии и здравоохранения.
Наконец, рассмотрите возможность посещения других наших блогов для получения дополнительной информации по связанным темам, которые могут быть полезны для исправления (или предотвращения) мышечного дисбаланса:
Примечание : если ваш дисбаланс является результатом серьезного заболевания или более серьезной продолжающейся травмы, исправить это может быть не так просто.Обратитесь за советом к врачу и посмотрите, помогут ли вам предыдущие предложения.